STM8S系列基于IAR标准外设printf输出demo
创始人
2024-06-01 17:55:46
0次
STM8S系列基于IAR标准外设printf输出demo
- 📌STM8S/A标准外设库(库版本
V2.3.1) - 📍官网标准外设库:
https://www.st.com/zh/embedded-software/stsw-stm8069.html
⛳注意事项
- 🚩在内存空间比较有限的情况下,请谨慎使用,只是为了方便调试时查看信息。因为使用printf函数需要占用很多内存空间。
- 🔰为什么不使用ST官方标准库内所提供的模版,因为官方提供的工程模版,涵盖了整个所有的STM8系列型号产品,整个模版工程很臃肿,也尝试过使用该模版来创建新工程,编译时没有问题,发现在烧录的时候,提示代码空间不够,超了,自己新建的工程将代码移植过去就没有问题。
📖输出函数选择差异:putchar() 和 fputc()
- 🌿使用
putchar()作为对外输出重载函数,只需要包含stdio.h即可。(推荐)
int putchar( int ch )
{while( !( UART1->SR & 0X80 ) ); //循环发送,直到发送完毕UART1->DR = ( u8 ) ch;//直接操作寄存器,提高执行效率return ch;
}
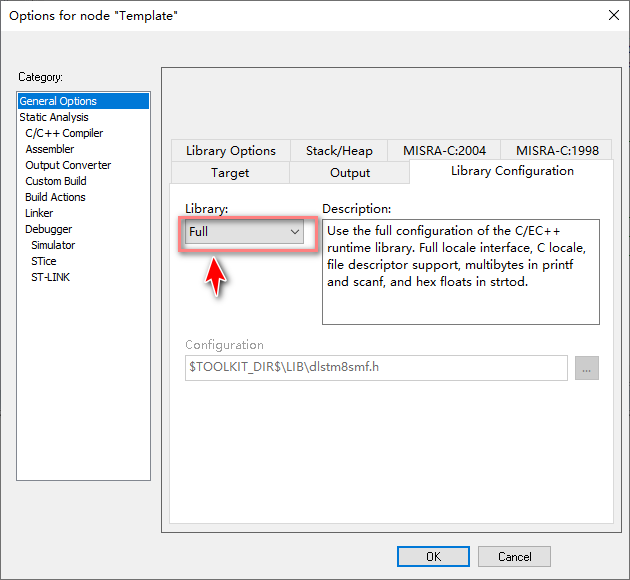
- 🍁使用
fputc()时还行需要在工程选项中配置开启full选项,所占用的内存空间更多,如果程序大一点,后面在烧录的时候有可能会报内存空间超了的问题。
/*******************************************************************************
**函数名称:int fputc(int ch, FILE *f)
**功能描述:系统标准Printf函数的接口函数
**入口参数:int ch, FILE *f 系统连接
**输出:无
*******************************************************************************/
int fputc( int ch, FILE *f )
{Send( ch );return ch;
}
🔖所以在使用时建议还是使用
putchar()函数。
🔨IAR工程搭建
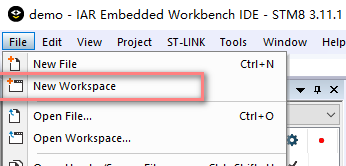
- 在创建工程前,先搭建工作空间。
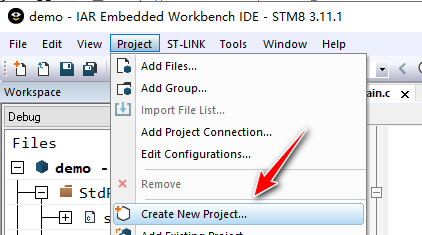
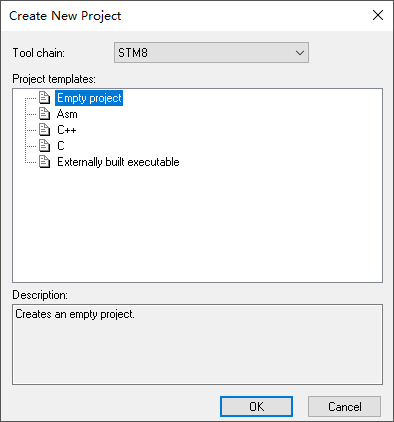
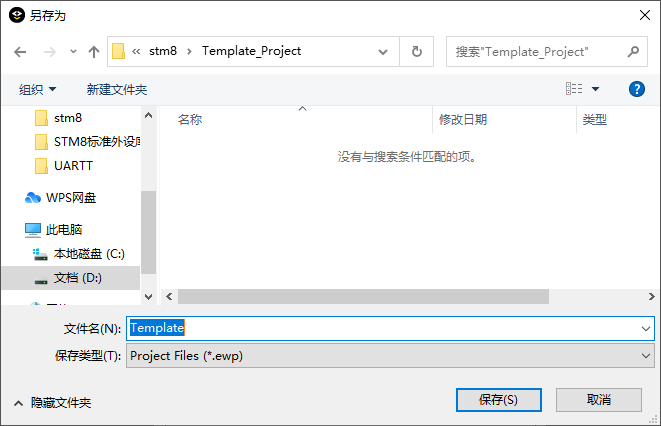
- 创建工程,选择空工程作为模版,取好工程名并保存。
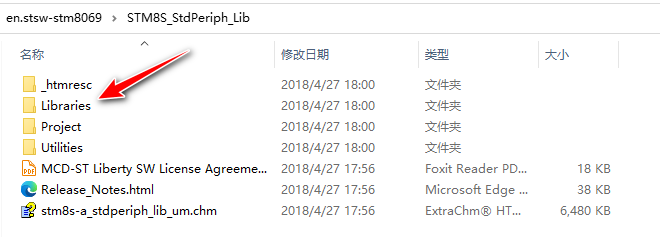
3. 将从官方下载下来的标准外设库资源解压,并将里面的Library文件夹拷贝到项目工程目录下。
-
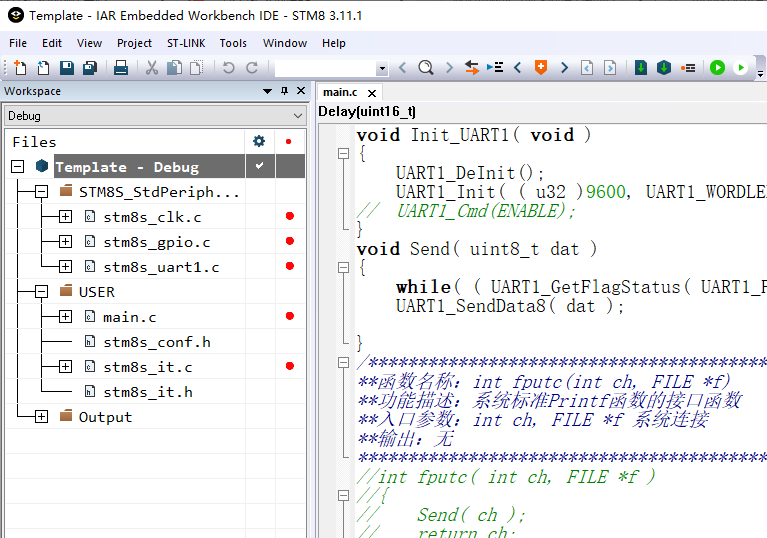
加载标准外设库中所要用到的源文件(.c文件),可以按需添加,如果不清楚要添加哪些也可以全部添加进来,编译时报错,就移除没有的。
-
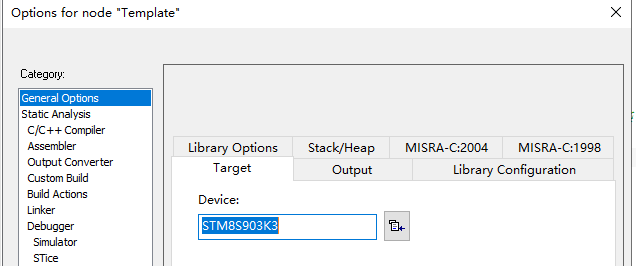
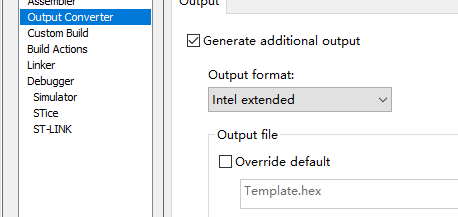
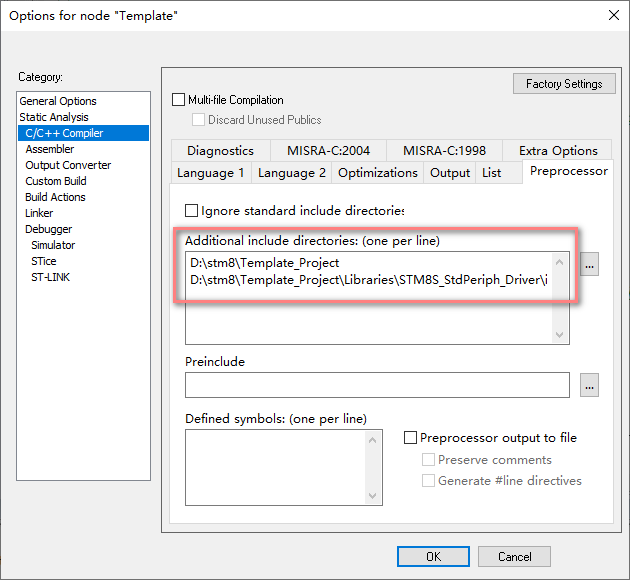
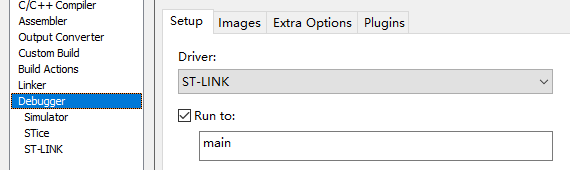
配置单片机型号以及添加头文件路径,输出编译文件格式,烧录器。
📝demo主程序代码
/* Includes ------------------------------------------------------------------*/
#include "stm8s.h"
#include /* Private defines -----------------------------------------------------------*/
/* Private function prototypes -----------------------------------------------*/
/* Private functions ---------------------------------------------------------*/
#define LED_GPIO_PORT (GPIOD)
#define LED_GPIO_PINS (GPIO_PIN_2|GPIO_PIN_7)void Delay( uint16_t nCount )
{/* Decrement nCount value */while ( nCount != 0 ){nCount--;}
}
void Init_UART1( void )
{UART1_DeInit();UART1_Init( ( u32 )9600, UART1_WORDLENGTH_8D, UART1_STOPBITS_1, UART1_PARITY_NO, UART1_SYNCMODE_CLOCK_DISABLE, UART1_MODE_TX_ENABLE );
// UART1_Cmd(ENABLE);
}
void Send( uint8_t dat )
{while( ( UART1_GetFlagStatus( UART1_FLAG_TXE ) == RESET ) );UART1_SendData8( dat );}
/*******************************************************************************
**函数名称:int fputc(int ch, FILE *f)
**功能描述:系统标准Printf函数的接口函数
**入口参数:int ch, FILE *f 系统连接
**输出:无
*******************************************************************************/
//int fputc( int ch, FILE *f )
//{
// Send( ch );
// return ch;
//}int putchar( int ch )
{while( !( UART1->SR & 0X80 ) ); //循环发送,直到发送完毕UART1->DR = ( u8 ) ch;//直接操作寄存器,提高执行效率return ch;
}
void delay_ms ( int ms ) //Function Definition
{int i, j;for ( i = 0; i <= ms; i++ )for ( j = 0; j < 120; j++ ) // Nop = Fosc/4__asm( "nop" ); //Perform no operation //assembly code
}void main( void )
{//CLK_HSIPrescalerConfig(CLK_PRESCALER_HSIDIV1);Init_UART1();GPIO_Init( LED_GPIO_PORT, ( GPIO_Pin_TypeDef )LED_GPIO_PINS, GPIO_MODE_OUT_PP_HIGH_SLOW ); //led/* Infinite loop */while ( 1 ){delay_ms( 1000 );printf( "Hello World! \r\n" );GPIO_WriteReverse( LED_GPIO_PORT, ( GPIO_Pin_TypeDef )LED_GPIO_PINS );delay_ms( 1000 );printf( "STM8S903K3T6 \r\n" );}}#ifdef USE_FULL_ASSERT/**断言函数:它的作用是在编程的过程中为程序提供参数检查* @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval : None*/
void assert_failed( u8* file, u32 line )
{/* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* Infinite loop */while ( 1 ){}
}
#endif
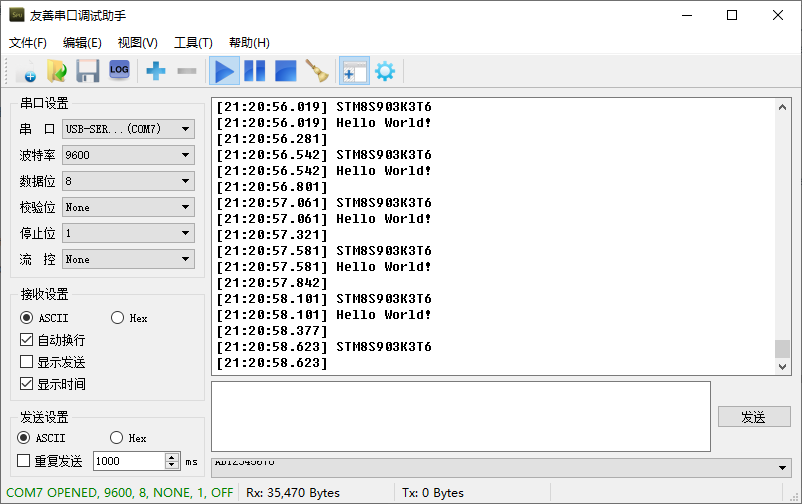
- 📜串口打印效果:
📚工程源码
链接: https://pan.baidu.com/s/11U3Its5OklRpwdJQH1aW_g
提取码: b8h3
下一篇:docker基本命令 - 数据卷
相关内容
热门资讯
保存时出现了1个错误,导致这篇...
当保存文章时出现错误时,可以通过以下步骤解决问题:查看错误信息:查看错误提示信息可以帮助我们了解具体...
汇川伺服电机位置控制模式参数配...
1. 基本控制参数设置 1)设置位置控制模式 2)绝对值位置线性模...
不能访问光猫的的管理页面
光猫是现代家庭宽带网络的重要组成部分,它可以提供高速稳定的网络连接。但是,有时候我们会遇到不能访问光...
不一致的条件格式
要解决不一致的条件格式问题,可以按照以下步骤进行:确定条件格式的规则:首先,需要明确条件格式的规则是...
本地主机上的图像未显示
问题描述:在本地主机上显示图像时,图像未能正常显示。解决方法:以下是一些可能的解决方法,具体取决于问...
表格中数据未显示
当表格中的数据未显示时,可能是由于以下几个原因导致的:HTML代码问题:检查表格的HTML代码是否正...
表格列调整大小出现问题
问题描述:表格列调整大小出现问题,无法正常调整列宽。解决方法:检查表格的布局方式是否正确。确保表格使...
Android|无法访问或保存...
这个问题可能是由于权限设置不正确导致的。您需要在应用程序清单文件中添加以下代码来请求适当的权限:此外...
银河麒麟V10SP1高级服务器...
银河麒麟高级服务器操作系统简介: 银河麒麟高级服务器操作系统V10是针对企业级关键业务...
【NI Multisim 14...
目录 序言 一、工具栏 🍊1.“标准”工具栏 🍊 2.视图工具...