simulink PID控制
创始人
2024-05-28 19:08:03
0次
系列文章目录
文章目录
- 系列文章目录
- 前言
- 一、非线性系统线性化
- 原理
- 二、反馈控制
- 开环控制
- 反馈or闭环控制
- PID Controller
- PID微调
- 案例
- 总结
前言
- 将非线性系统近似线性化
- PIDblock与微调
提示:以下是本篇文章正文内容,下面案例可供参考
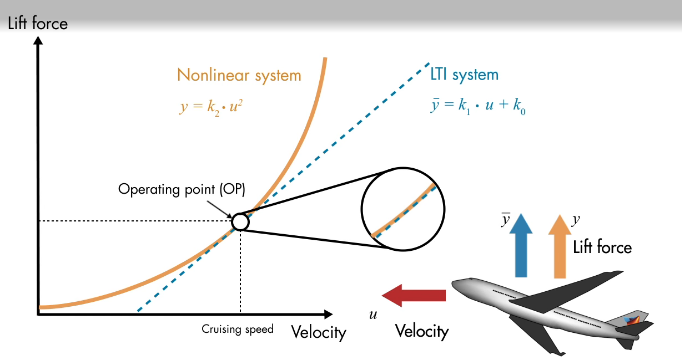
一、非线性系统线性化
- 非线性系统输入电流与电机带动物体位移的关系:
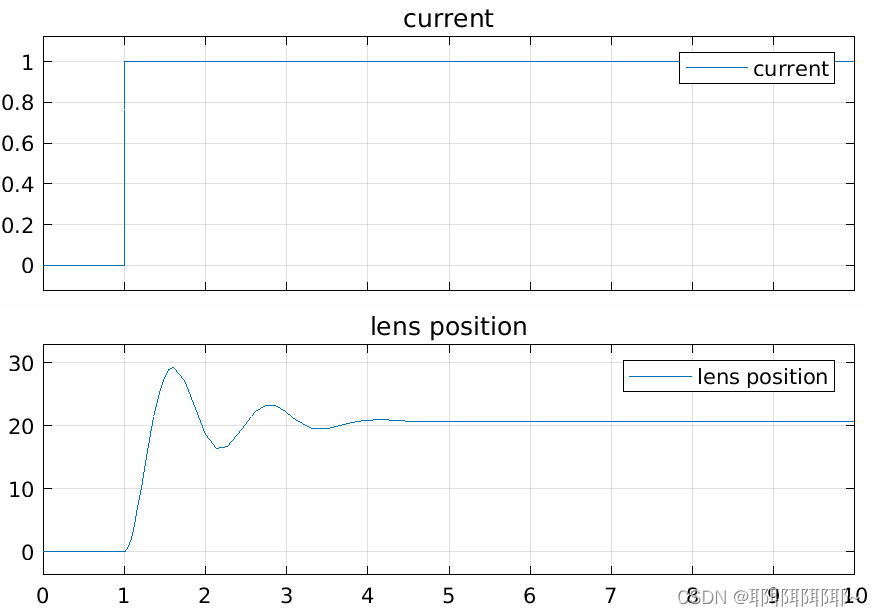
其输入的电流值与最终输出的位移值为非线性关系.
- 在APP标签页下点击
 , 将需要线性化的系统的输入输出分别设置为
, 将需要线性化的系统的输入输出分别设置为
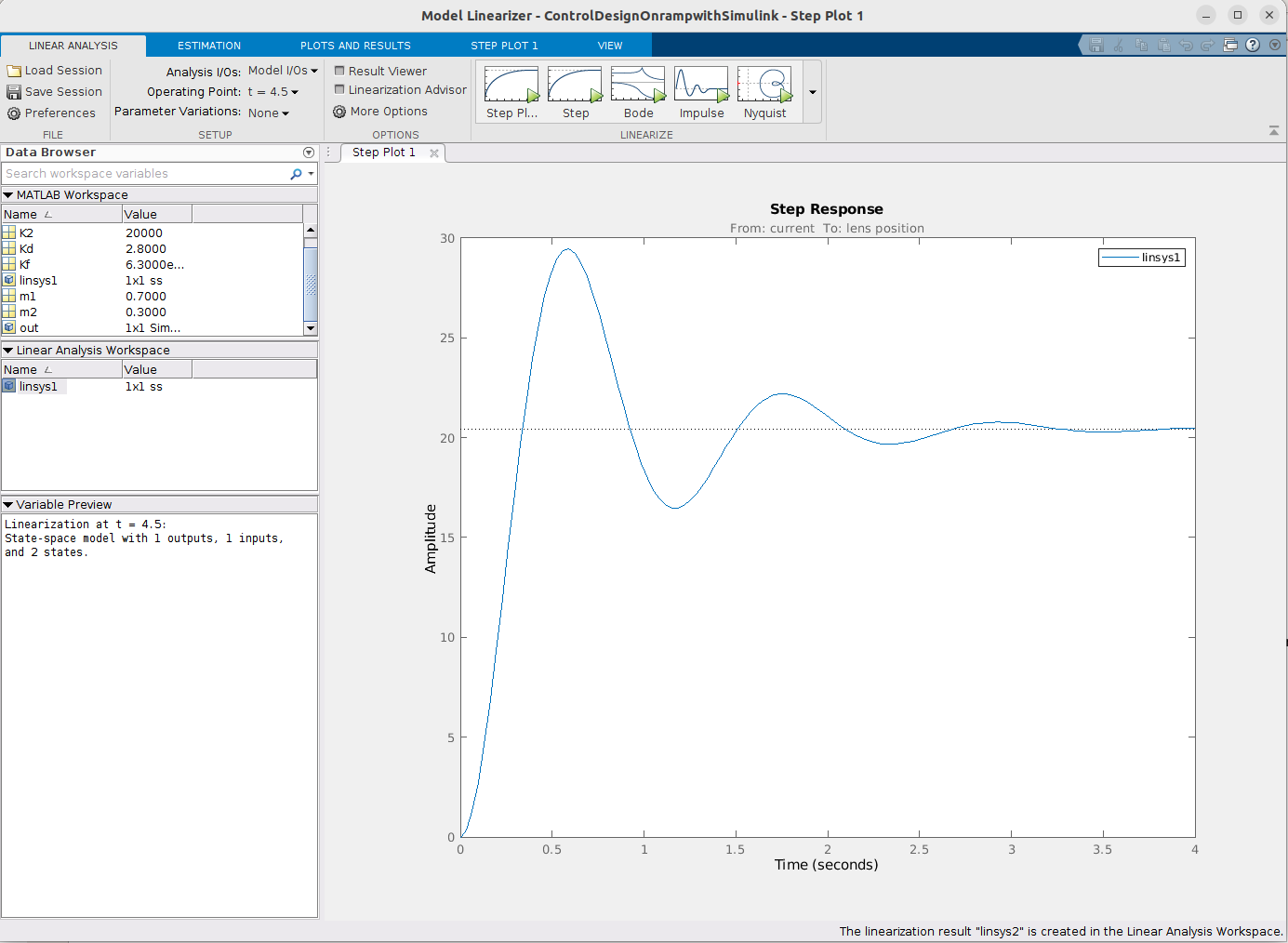
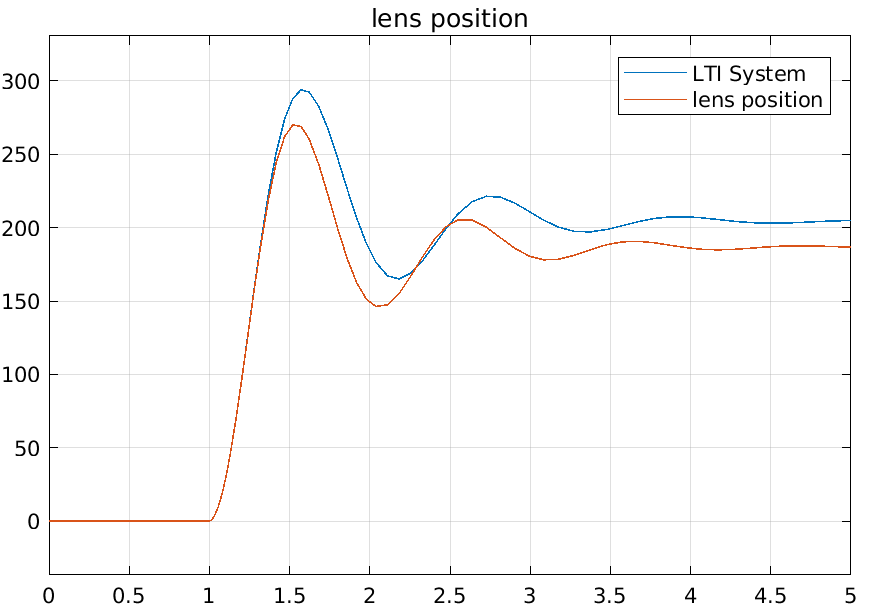
- APPS->Model Linearizer。在SETUP 中设置操作点 这里t=4.5, 然后点击step,会在工作区显示出阶跃响应曲线。将Linear Analysis Workspace中的linsys拖拽至MATLAB Workspace。
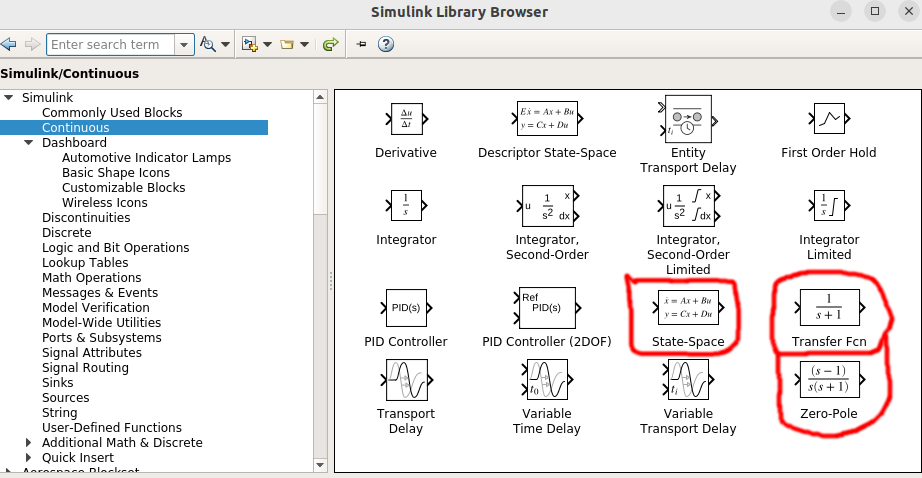
- 添加LTI system模块,将LTI system variable替换为之前新增的变量,比较系统线性化后与原系统的输出
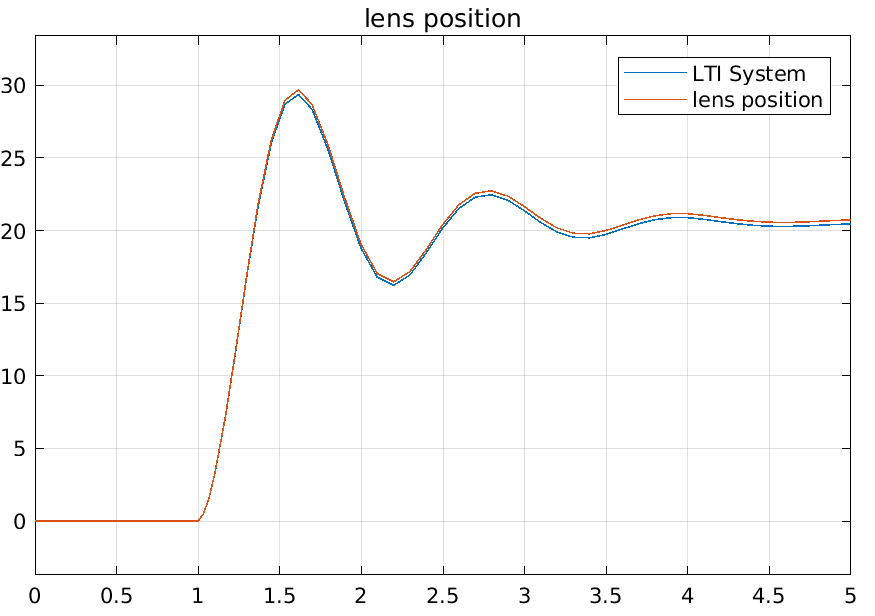
当把输入从原来的1改为10后,次线性系统失效
更多与系统线性化相关的模块参考可参考相关文档
在Model Linearizer窗口中可单击图像空白处查看:
- 上升时间
- 超调量
- 达到稳态的时间
- 稳态值
原理
非线性函数的切线处可近似线性化切点附近
二、反馈控制
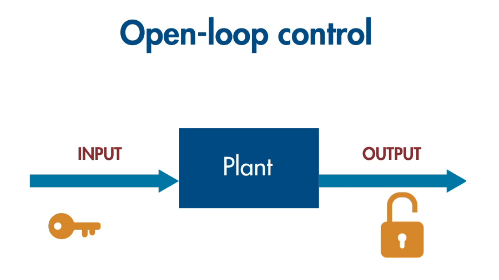
开环控制
反馈or闭环控制
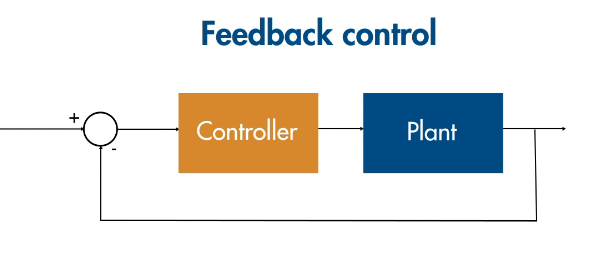
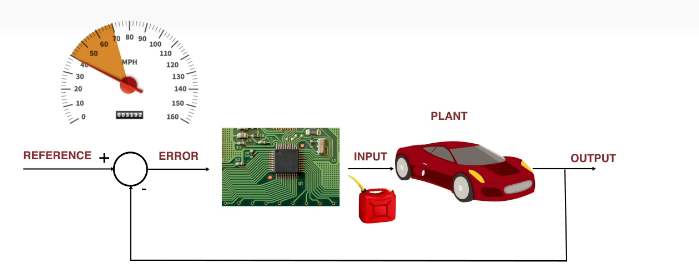
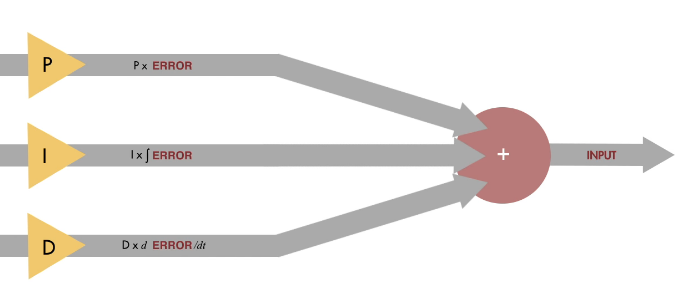
PID Controller
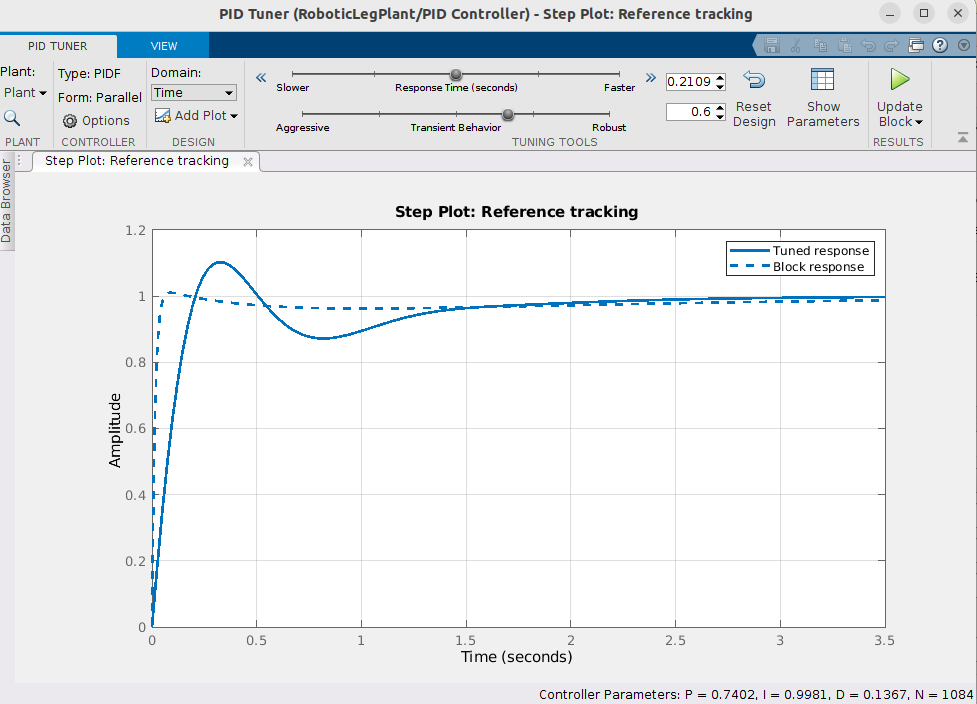
PID微调
双击PIDblock打开对话框,右下边点击tune即可对PID参数进行调整
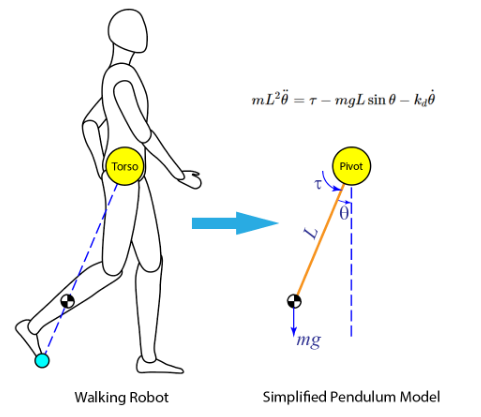
案例
mL2θ¨=τ−mgLsinθ−kdθ˙mL^2\ddot \theta = \tau - mgLsin\theta - k_d \dot \theta mL2θ¨=τ−mgLsinθ−kdθ˙
总结
上一篇:蚁群算法c++
下一篇:Linux内核源码进程原理分析
相关内容
热门资讯
保存时出现了1个错误,导致这篇...
当保存文章时出现错误时,可以通过以下步骤解决问题:查看错误信息:查看错误提示信息可以帮助我们了解具体...
汇川伺服电机位置控制模式参数配...
1. 基本控制参数设置 1)设置位置控制模式 2)绝对值位置线性模...
不能访问光猫的的管理页面
光猫是现代家庭宽带网络的重要组成部分,它可以提供高速稳定的网络连接。但是,有时候我们会遇到不能访问光...
不一致的条件格式
要解决不一致的条件格式问题,可以按照以下步骤进行:确定条件格式的规则:首先,需要明确条件格式的规则是...
本地主机上的图像未显示
问题描述:在本地主机上显示图像时,图像未能正常显示。解决方法:以下是一些可能的解决方法,具体取决于问...
表格中数据未显示
当表格中的数据未显示时,可能是由于以下几个原因导致的:HTML代码问题:检查表格的HTML代码是否正...
表格列调整大小出现问题
问题描述:表格列调整大小出现问题,无法正常调整列宽。解决方法:检查表格的布局方式是否正确。确保表格使...
Android|无法访问或保存...
这个问题可能是由于权限设置不正确导致的。您需要在应用程序清单文件中添加以下代码来请求适当的权限:此外...
银河麒麟V10SP1高级服务器...
银河麒麟高级服务器操作系统简介: 银河麒麟高级服务器操作系统V10是针对企业级关键业务...
【NI Multisim 14...
目录 序言 一、工具栏 🍊1.“标准”工具栏 🍊 2.视图工具...