robosuite添加无碰撞的模型
创始人
2024-05-31 11:52:39
0次
1 前言
最近在使用robosuite时,需要在仿真环境中可视化物体的目标位置,从而方便观察训练情况,可视化的物体有以下要求:
- 形状尺寸与操作的物体一样
- 半透明
- 只有visual,不与场景其他物体有碰撞
- 可以在每次step后设置位置,且固定在设定的位置,不受重力影响
2 方法
找了半天,最终确定了基本思路:
- 在环境reset时,初始化一个与操作物体的形状尺寸一样的物体,可以加在xml模型,或通过robosuite内置的模型API,设置模型只有visual,颜色半透明.
- 在任务每次step时,设置物体的位置
以下代码只用于robosuite中,原始mujoco不可用:
(1) 初始化物体并载入任务仿真场景
# 初始化操作物体
self.cube = BoxObject(name="cube",density=100,size_min=[0.03, 0.03, 0.03],size_max=[0.06, 0.06, 0.06],rgba=[1, 0, 0, 1],material=redwood,
)
# 初始化仅可视化的目标物体
self.cube_target = BoxObject(name="cube_target",size=self.cube.size,rgba=[1, 0, 0, 0.5],obj_type='visual',joints=None,
)
...
self.model = ManipulationTask(mujoco_arena=mujoco_arena,mujoco_robots=[robot.robot_model for robot in self.robots],mujoco_objects=[self.cube, self.cube_target],
)
(2) 在任务每次step时,设置物体的位置
cube_target_id = self.env.sim.model.body_name2id('cube_target_main') # 获取仅可视化的目标物体的id
self.env.sim.model.body_pos[cube_target_id] = np.array([0, 0, 1]) # 设置新位置
self.env.sim.model.body_quat[cube_target_id] = np.array([1, 0, 0, 0]) # 设置新四元数 wxyz
3 可视化结果
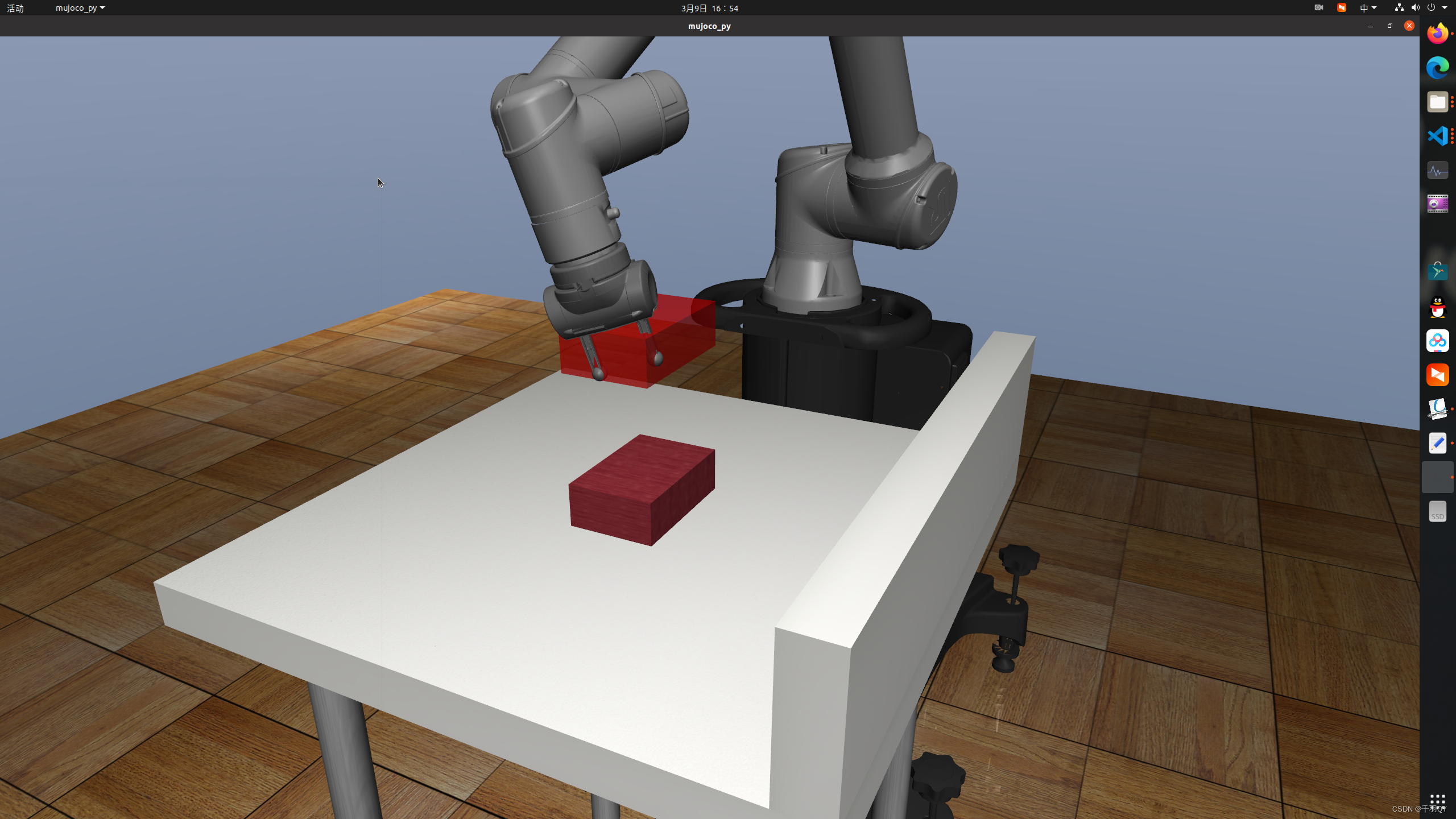 图中,桌子上的红色木纹方块是cube,更高的半透明红色方块是cube_target.
图中,桌子上的红色木纹方块是cube,更高的半透明红色方块是cube_target.
下一篇:单点登录的几种实现方式探讨
相关内容
热门资讯
保存时出现了1个错误,导致这篇...
当保存文章时出现错误时,可以通过以下步骤解决问题:查看错误信息:查看错误提示信息可以帮助我们了解具体...
汇川伺服电机位置控制模式参数配...
1. 基本控制参数设置 1)设置位置控制模式 2)绝对值位置线性模...
不能访问光猫的的管理页面
光猫是现代家庭宽带网络的重要组成部分,它可以提供高速稳定的网络连接。但是,有时候我们会遇到不能访问光...
不一致的条件格式
要解决不一致的条件格式问题,可以按照以下步骤进行:确定条件格式的规则:首先,需要明确条件格式的规则是...
本地主机上的图像未显示
问题描述:在本地主机上显示图像时,图像未能正常显示。解决方法:以下是一些可能的解决方法,具体取决于问...
表格列调整大小出现问题
问题描述:表格列调整大小出现问题,无法正常调整列宽。解决方法:检查表格的布局方式是否正确。确保表格使...
表格中数据未显示
当表格中的数据未显示时,可能是由于以下几个原因导致的:HTML代码问题:检查表格的HTML代码是否正...
Android|无法访问或保存...
这个问题可能是由于权限设置不正确导致的。您需要在应用程序清单文件中添加以下代码来请求适当的权限:此外...
银河麒麟V10SP1高级服务器...
银河麒麟高级服务器操作系统简介: 银河麒麟高级服务器操作系统V10是针对企业级关键业务...
【NI Multisim 14...
目录 序言 一、工具栏 🍊1.“标准”工具栏 🍊 2.视图工具...