ROS小车研究笔记3/18/2023:SLAM建图系统架构
创始人
2025-05-30 05:34:37
0次
小车TF树
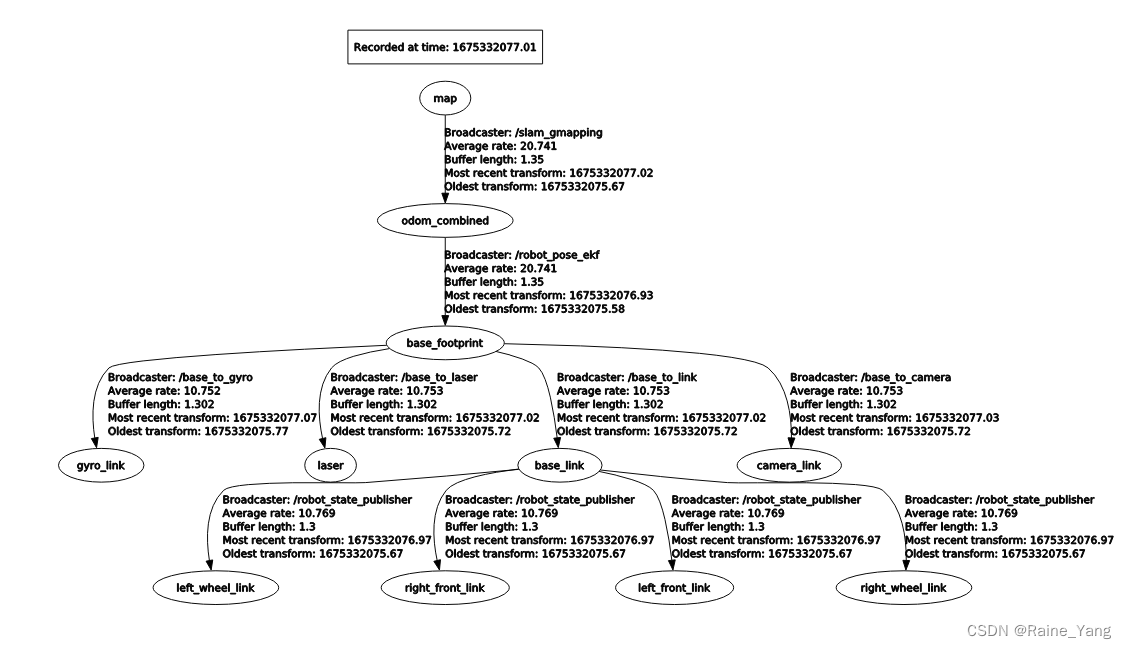
1 base_link:
base_link代表了小车车体坐标,其子坐标系定义了各个车轮相对于车体的位置。
2 base_footprint:
base_footprint集合了小车车体和各传感器的坐标。其子坐标系定义了小车摄像机,雷达,陀螺仪,和车体的相对位置。
3 odom_combined
odom_combined使用卡尔曼滤波将里程计和imu的信息结合得到了更精准的小车坐标信息
4 map
地图原点坐标系。robot_pose_ekf发布地图原点和小车的坐标系变换
建图节点
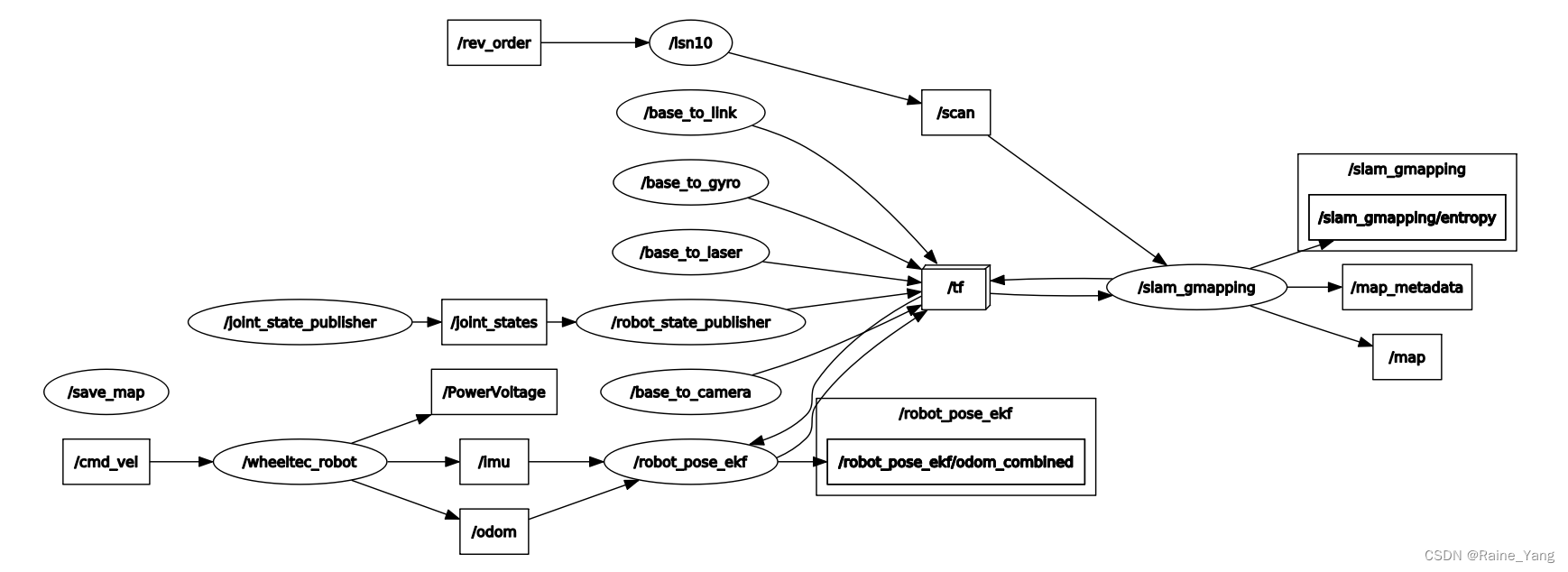
1 gmapping节点slam_gmapping
gmapping算法实现需要输入激光雷达深度信息,里程计信息,和imu信息。gmapping发布栅格地图信息
1 深度信息:由激光雷达节点发布的/scan话题
2 里程计信息:gmapping没有直接订阅里程计话题,而是依靠小车和地图坐标系的tf变换得到小车路程
3 imu信息:订阅经过卡尔曼滤波节点robot_pose_ekf处理过的imu信息/odom_combinedgmapping节点发布消息/map由rviz定义以实现地图可视化
gmapping的参数文件为algorithm_gmapping.launch。在该文件里可以配置和算法有关参数
2 wheeltec_robot
wheeltec_robot节点为小车控制节点,其发布里程计和imu消息,并根据传入的速度控制指令来控制下位机电机
1 发布话题:/PowerVoltage:电池电量信息/imu:imu信息/odom:里程计信息2 订阅话题:/cmd_vel:速度控制指令,节点会根据指令向下位机进行串口通信
相关内容
热门资讯
保存时出现了1个错误,导致这篇...
当保存文章时出现错误时,可以通过以下步骤解决问题:查看错误信息:查看错误提示信息可以帮助我们了解具体...
汇川伺服电机位置控制模式参数配...
1. 基本控制参数设置 1)设置位置控制模式 2)绝对值位置线性模...
不能访问光猫的的管理页面
光猫是现代家庭宽带网络的重要组成部分,它可以提供高速稳定的网络连接。但是,有时候我们会遇到不能访问光...
不一致的条件格式
要解决不一致的条件格式问题,可以按照以下步骤进行:确定条件格式的规则:首先,需要明确条件格式的规则是...
本地主机上的图像未显示
问题描述:在本地主机上显示图像时,图像未能正常显示。解决方法:以下是一些可能的解决方法,具体取决于问...
表格列调整大小出现问题
问题描述:表格列调整大小出现问题,无法正常调整列宽。解决方法:检查表格的布局方式是否正确。确保表格使...
表格中数据未显示
当表格中的数据未显示时,可能是由于以下几个原因导致的:HTML代码问题:检查表格的HTML代码是否正...
Android|无法访问或保存...
这个问题可能是由于权限设置不正确导致的。您需要在应用程序清单文件中添加以下代码来请求适当的权限:此外...
银河麒麟V10SP1高级服务器...
银河麒麟高级服务器操作系统简介: 银河麒麟高级服务器操作系统V10是针对企业级关键业务...
【NI Multisim 14...
目录 序言 一、工具栏 🍊1.“标准”工具栏 🍊 2.视图工具...