ROS三种通信方式初体验
创始人
2025-05-30 16:57:55
0次
文章目录
- 前言
- 一、工作空间与功能包的创建
- 1、工作空间的创建
- 2、功能包的创建
- 二、话题编程
- 1.创建发布者
- 2.创建订阅者
- 3、修改CMakeLists.txt文件内容
- 4、测试
- 三、服务编程
- 1、定义服务请求与应答的方式
- 2、创建服务端
- 3、创建客户端
- 4、测试
- 四、动作编程
- 1、新建action文件夹和TurtleMove.action文件
- 2、 新建turtleMove.cpp服务文件:
- 3、新建turtleMoveClient.cpp文件,用于发布位置:
- 4、修改CMakeList.txt文件
- 5、测试
- 五、总结
- 六、参考资料
前言
环境:
1、ubuntu20.0.4
2、ros
3、vscode
一、工作空间与功能包的创建
1、工作空间的创建
- alt+n新建一个终端用于创建工作空间;

- 代码:
mkdir -p ~/catkin_ws/src#创建文件夹cd ~/catkin_ws/src#进入目录catkin_init_workspace#初始化,使其成为ROS的工作空间
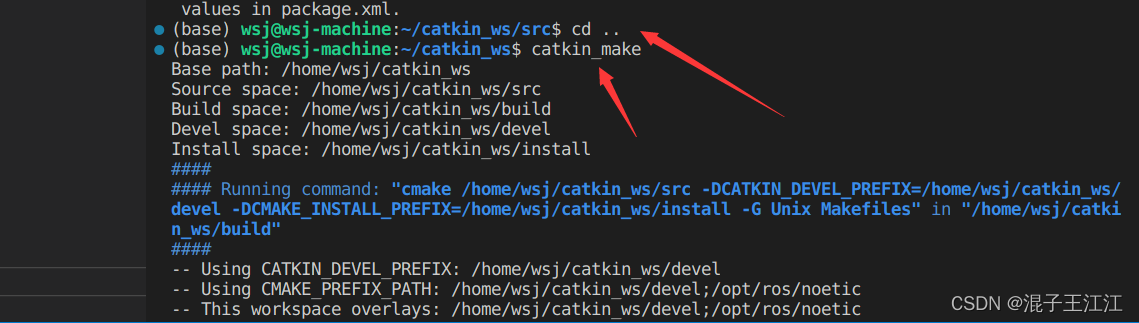
- 回到上一级目录编译工作空间:
cd ..
catkin_make
- 错误:
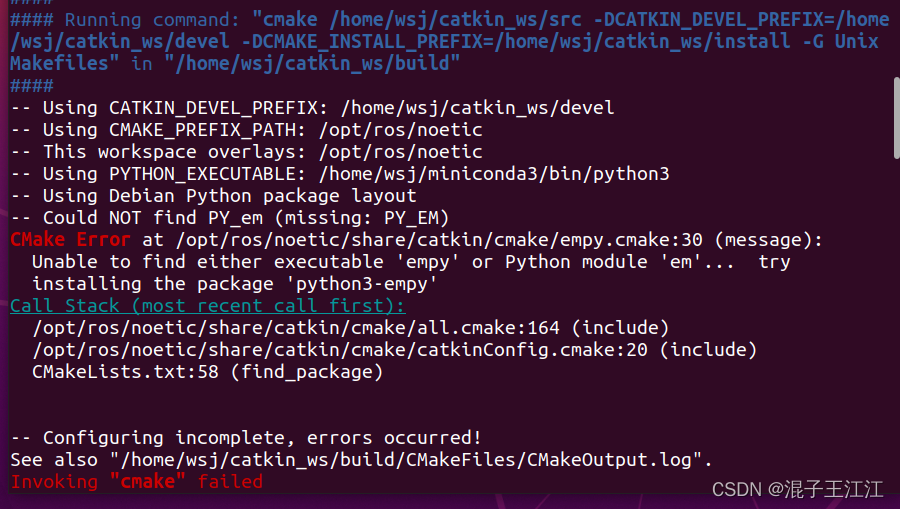
- 分析:
在ubuntu系统中,存在两个python;python2.7和python3.8;又装了一个conda后,出现了第三个版本的python3.9,所以需要改为指定采用下面的命令。
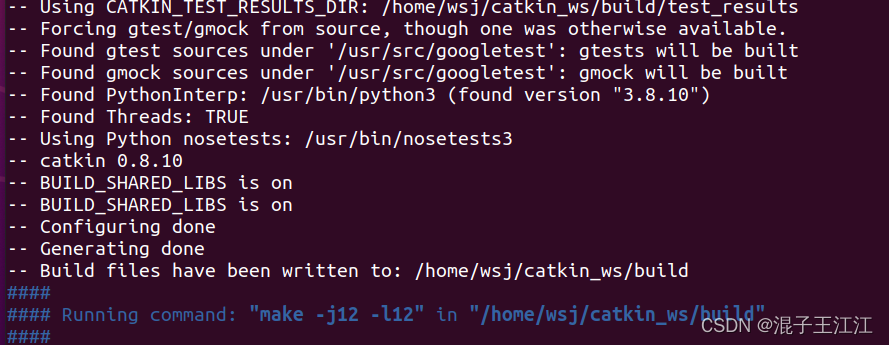
catkin_make -DPYTHON_EXECUTABLE=/usr/bin/python3
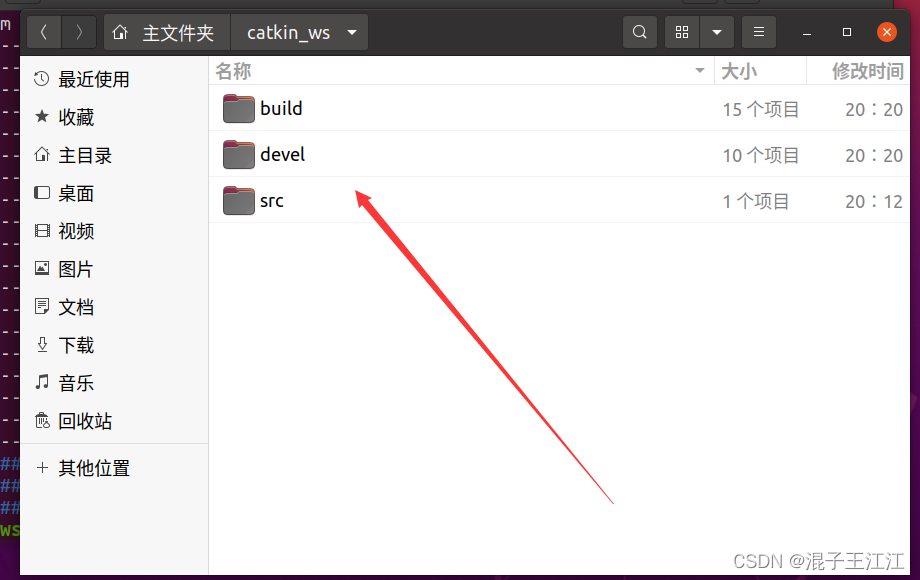
- 工作空间编译成功:
- 此时文件目录发生变化:
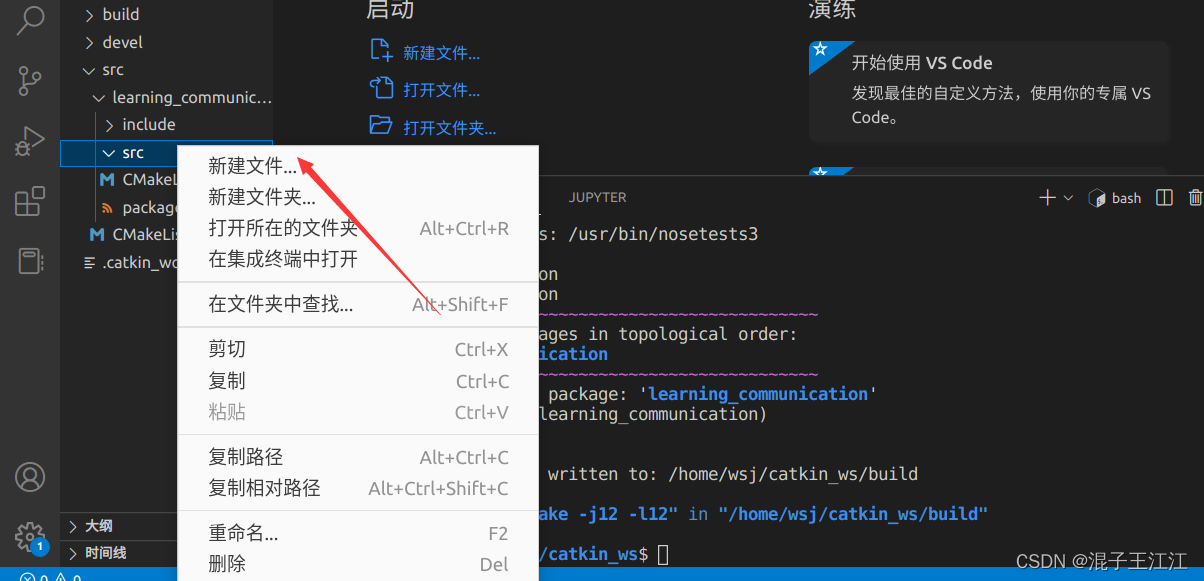
- 输入code打开进行编程:
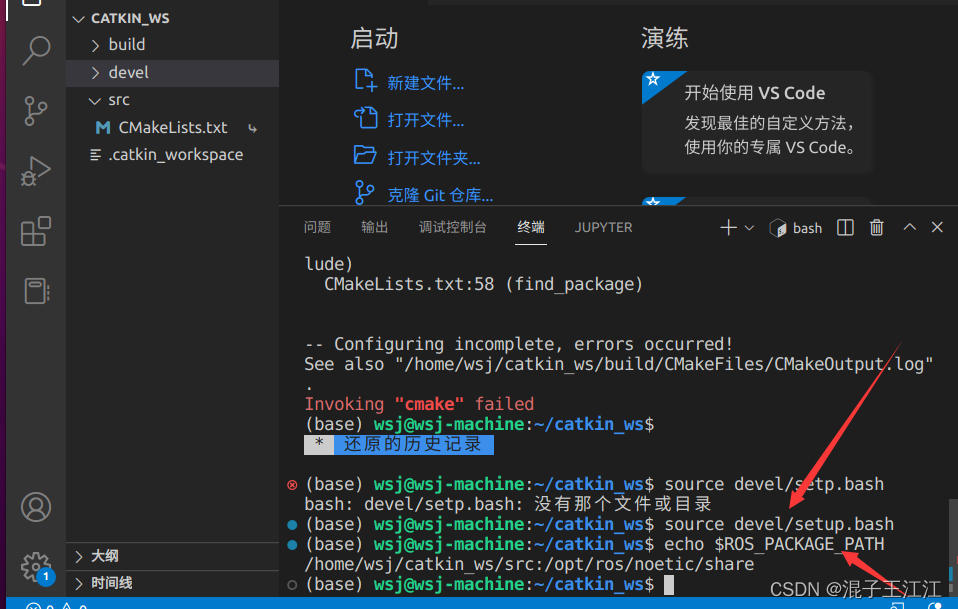
- 设置环境变量:
source devel/setup.bash
- 检测环境变量:
echo $ROS_PACKAGE_PATH
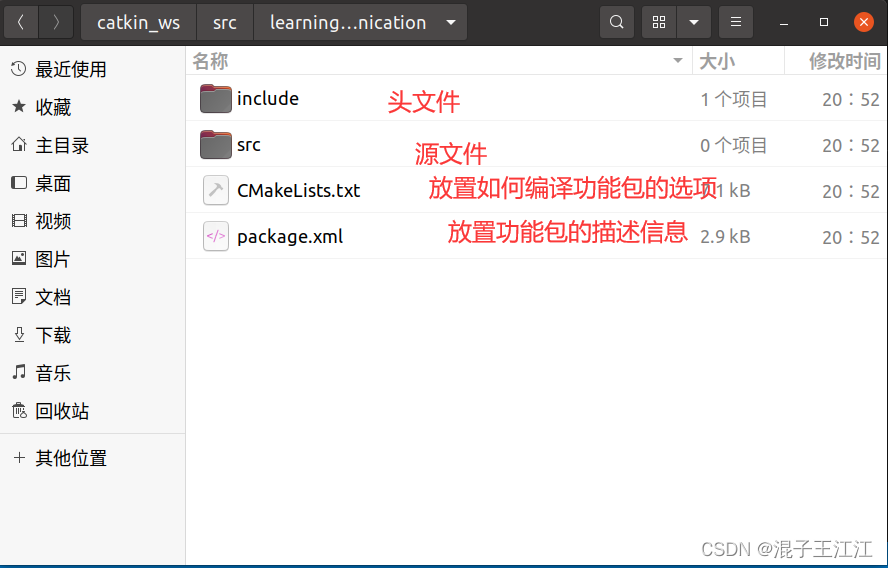
2、功能包的创建
进入src目录下键入下面命令创建功能包

catkin_create_pkg learning_communication std_msgs rospy roscpp
#格式分别是catkin_create_pkg+功能包名+定义的标准的数据结构+提供的编程接口
- 查看功能包文件夹:
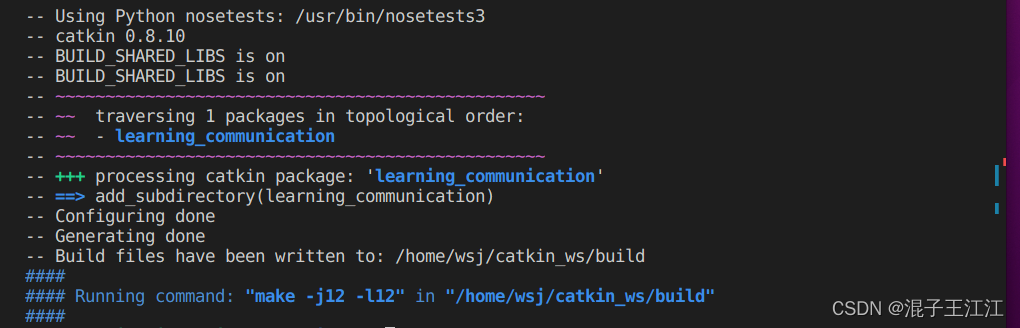
- 编译功能包:
- 回到上一级目录编译功能包:
cd ~/catkin_ws
catkin_make
- 编译成功:
二、话题编程
1.创建发布者
1、初始化ROS节点
2、向ROS Master注册节点信息,包括发布的话题名和话题中的消息类型
3、按照一定频率循环发布消息
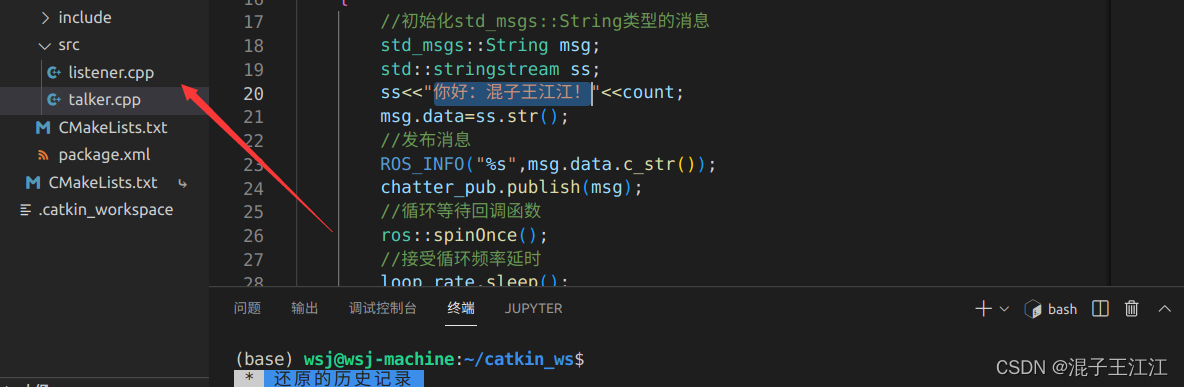
- 新建talker.cpp文件:
- 代码:
#include
#include"ros/ros.h"
#include"std_msgs/String.h"
int main(int argc,char **argv)
{setlocale(LC_CTYPE, "zh_CN.utf8");//ROS节点初始化ros::init(argc,argv,"talker");//创建节点句柄ros::NodeHandle n;//创建一个Publisher,发布名为chatter的topic,消息类型为std_msgs::Stringros::Publisher chatter_pub=n.advertise("chatter",1000);//设置循环的频率ros::Rate loop_rate(10);int count=0;while(ros::ok()){//初始化std_msgs::String类型的消息std_msgs::String msg;std::stringstream ss;ss<<"你好:混子王江江!"< 2.创建订阅者
1、初始化ROS节点
2、订阅需要的话题
3、循环等待话题消息,接受到消息后进行回调函数回调函数中完成消息处理
- 新建listener.cpp文件:
- 代码:
#include"ros/ros.h"
#include"std_msgs/String.h"
//接收到订阅的消息,会进入消息的回调函数
void chatterCallback(const std_msgs::String::ConstPtr& msg)
{//将接收到的消息打印处理ROS_INFO("I heard:{%s}",msg->data.c_str());
}
int main(int argc,char **argv)
{setlocale(LC_CTYPE, "zh_CN.utf8");//初始化ROS节点ros::init(argc,argv,"listener");//创建节点句柄ros::NodeHandle n;//创建一个Subscriber,订阅名为chatter的topic,注册回调函数chatterCallbackros::Subscriber sub=n.subscribe("chatter",1000,chatterCallback);//循环等待回调函数ros::spin();return 0;
}
3、修改CMakeLists.txt文件内容
- 在下面位置输入下面的内容:
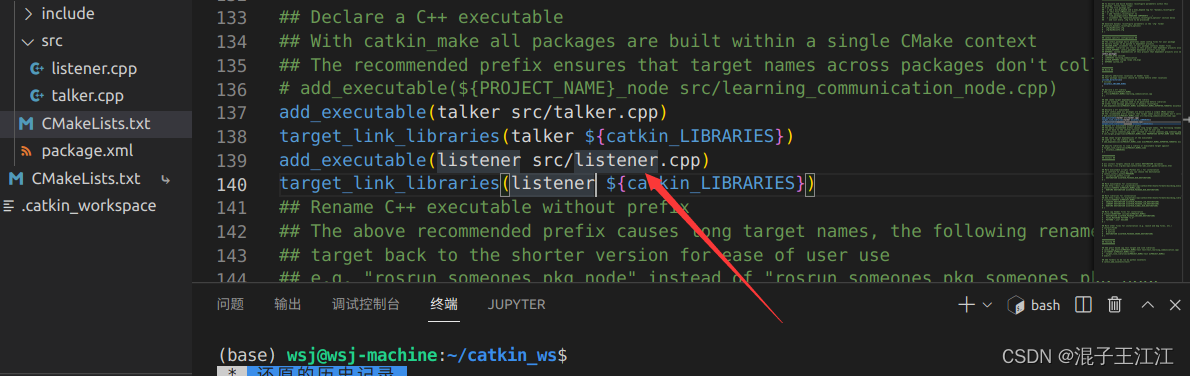
add_executable(talker src/talker.cpp)
target_link_libraries(talker ${catkin_LIBRARIES})
add_executable(listener src/listener.cpp)
target_link_libraries(listener ${catkin_LIBRARIES})
- 键入catkin_make编译:
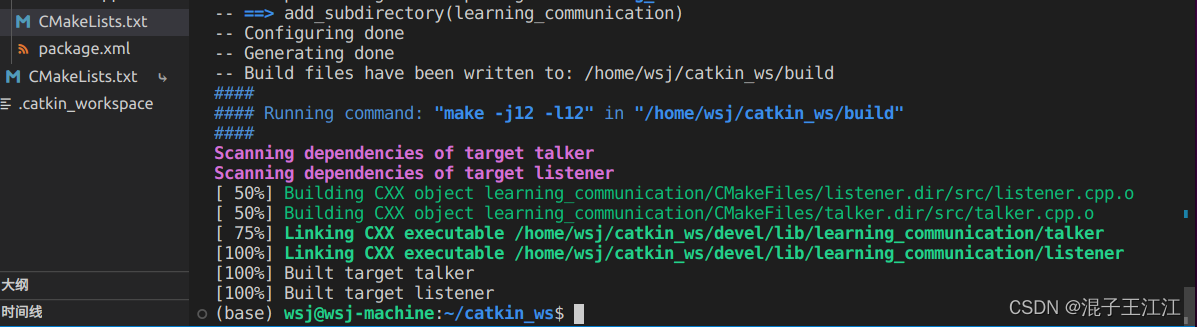
编译成功!
4、测试
- 打开三个终端测试:
roscore
rosrun learning_communication talker
rosrun learning_communication listener
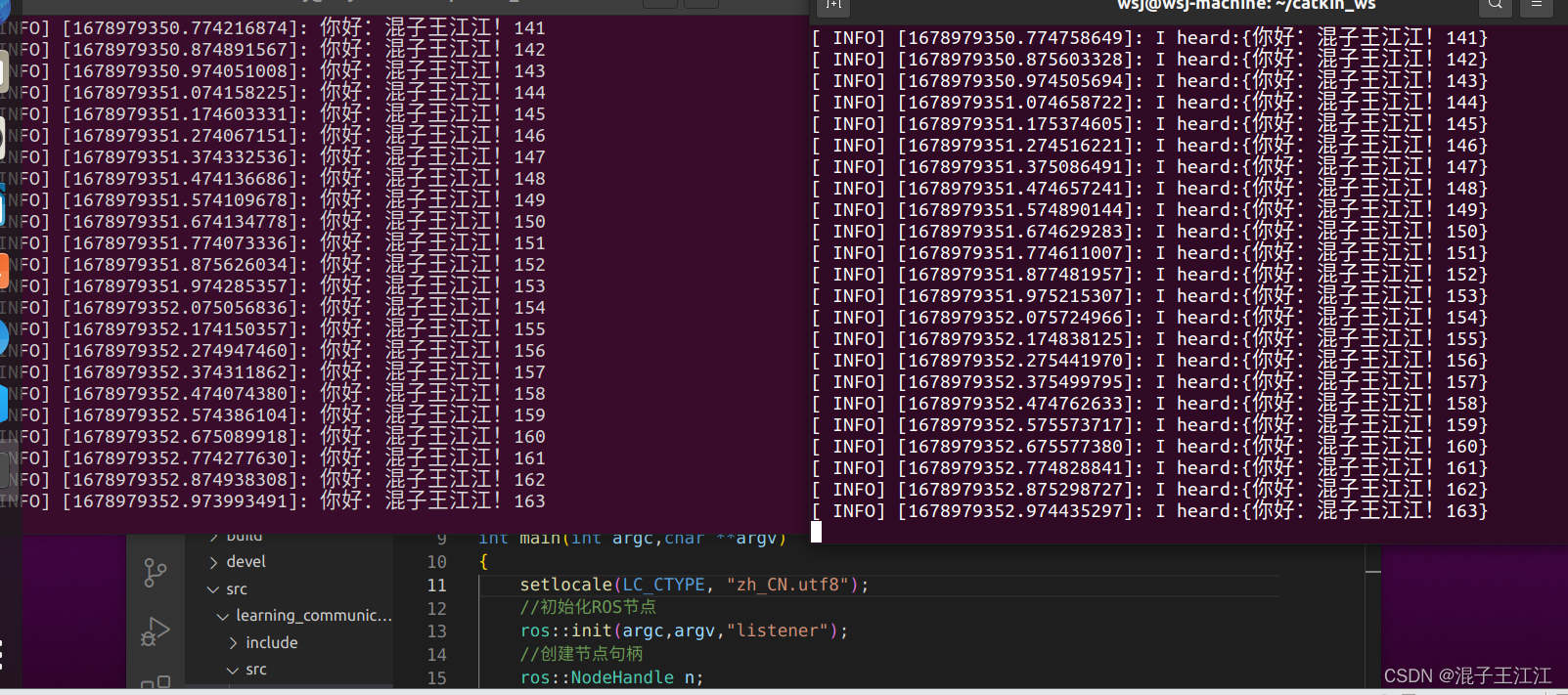
测试成功!
三、服务编程
1、定义服务请求与应答的方式
- List item
- 创建srv目录及AddTwoInts.srv文件:
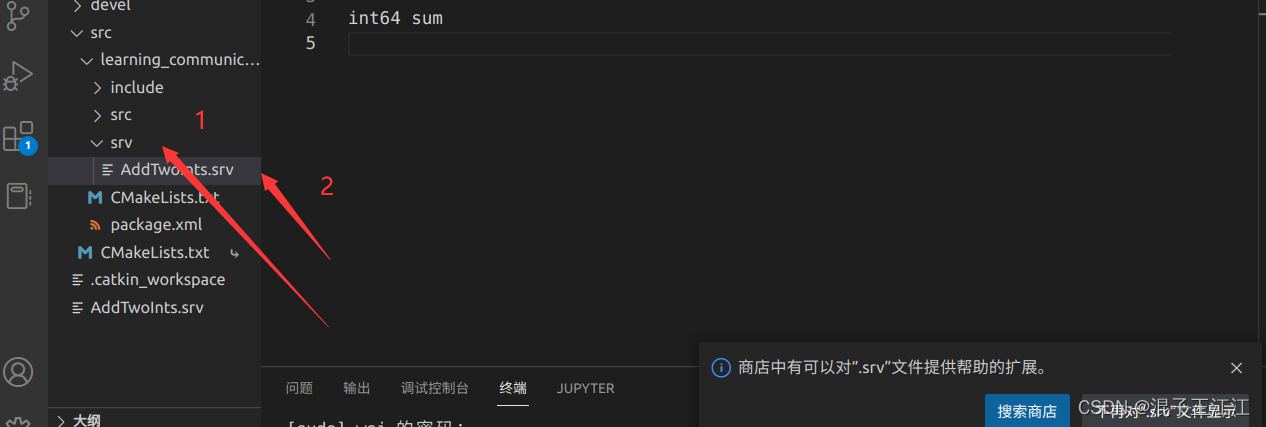
- AddTwoInts.srv文件内容:
int64 a
int64 b
---
int64 sum
- 在package.xml中添加功能包依赖:
message_generation
message_runtime
- 修改CMakeLists.txt文件内容:
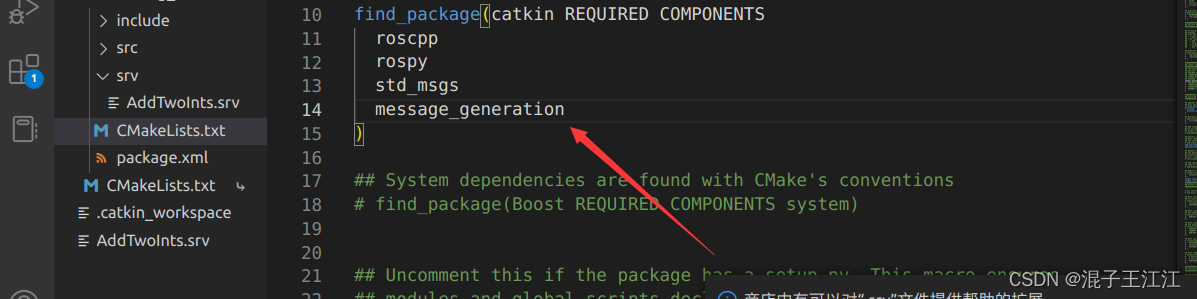
message_generation
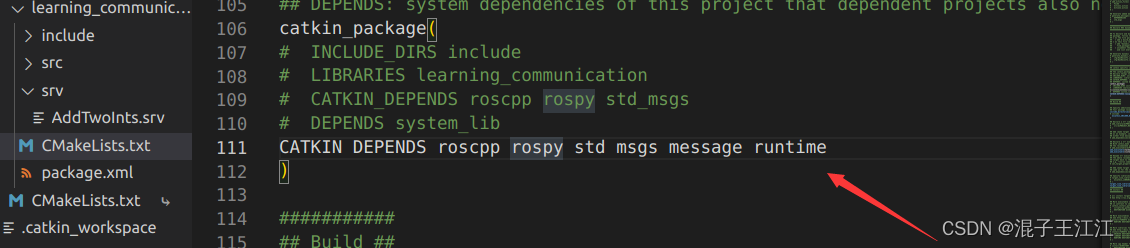
CATKIN DEPENDS roscpp rospy std msgs message runtime
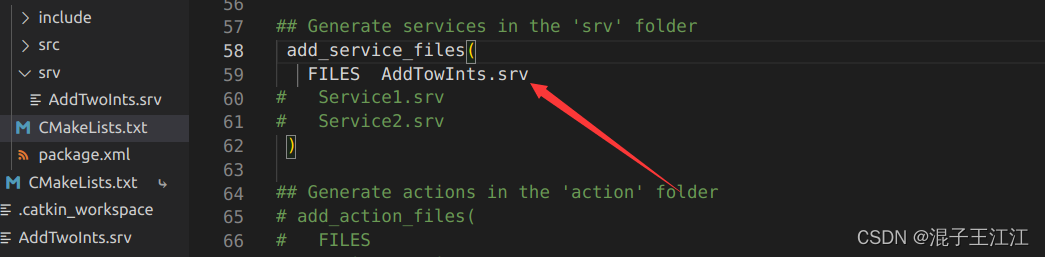
add_service_files(FILES AddTowInts.srv
# Service1.srv
# Service2.srv)
2、创建服务端
1、初始化ROS节点
2、创建Serve实例
3、循环等待服务请求,进入回调函数
4、在回调函数中完成服务功能的处理,并反馈应答数据
- server.cpp文件:
#include
#include"learning_communication/AddTwoInts.h"
//service回调函数,输入参数req,输出参数res
bool add(learning_communication::AddTwoInts::Request &req,learning_communication::AddTwoInts::Response &res)
{//将输入的参数中的请求数据相加,结果放到应答变量中res.sum=req.a+req.b;ROS_INFO("request: x=%1d,y=%1d",(long int)req.a,(long int)req.b);ROS_INFO("sending back response:[%1d]",(long int)res.sum);return true;
}
int main(int argc,char **argv)
{//ROS节点初始化ros::init(argc,argv,"add_two_ints_server");//创建节点句柄ros::NodeHandle n;//创建一个名为add_two_ints的server,注册回调函数add()ros::ServiceServer service=n.advertiseService("add_two_ints",add);//循环等待回调函数ROS_INFO("Ready to add two ints.");ros::spin();return 0;
} 3、创建客户端
1、初始化ROS节点
2、创建一个Client实例
3、发布服务请求数据
4、等待Serve处理之后的应答结果
- client.cpp文件:
#include
#include
#include"learning_communication/AddTwoInts.h"
int main(int argc,char **argv)
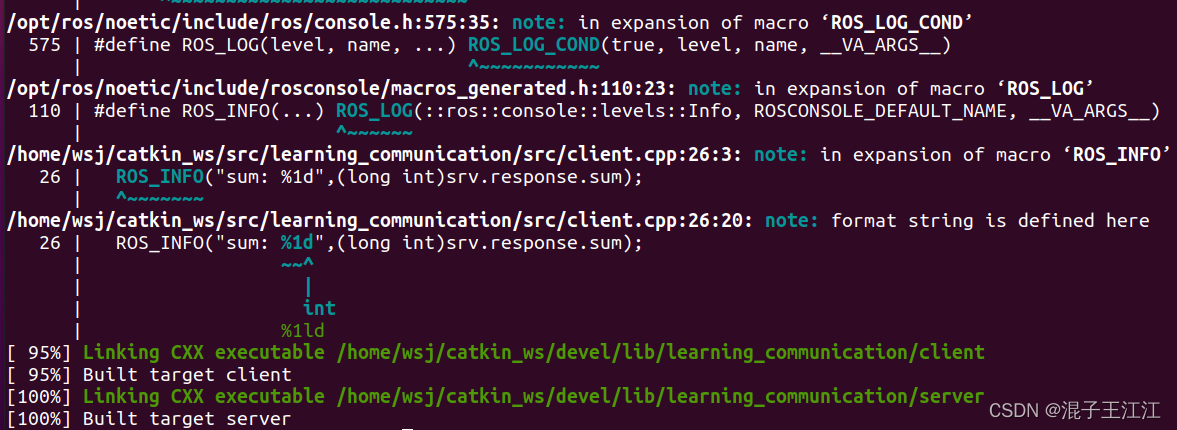
{//ROS节点初始化ros::init(argc,argv,"add_two_ints_client");//从终端命令行获取两个加数if(argc!=3){ROS_INFO("usage:add_two_ints_client X Y");return 1;}//创建节点句柄ros::NodeHandle n;//创建一个client,请求add_two_ints_service//service消息类型是learning_communication::AddTwoIntsros::ServiceClient client=n.serviceClient("add_two_ints");//创建learning_communication::AddTwoInts类型的service消息learning_communication::AddTwoInts srv;srv.request.a=atoll(argv[1]);srv.request.b=atoll(argv[2]);//发布service请求,等待加法运算的应答请求if(client.call(srv)){ROS_INFO("sum: %1d",(long int)srv.response.sum);}else{ROS_INFO("Failed to call service add_two_ints");return 1;}return 0;
} - 设置CMakeLists.txt文件:
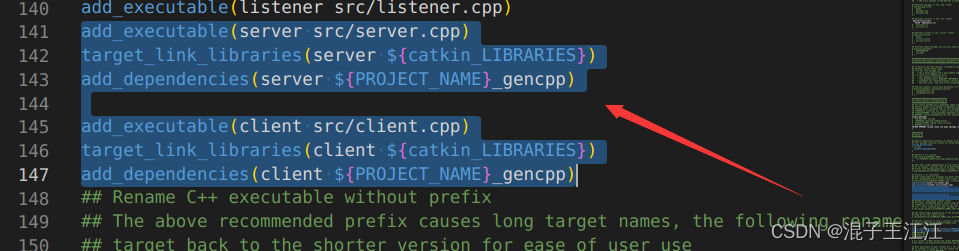
- 代码:
add_executable(server src/server.cpp)
target_link_libraries(server ${catkin_LIBRARIES})
add_dependencies(server ${PROJECT_NAME}_gencpp)add_executable(client src/client.cpp)
target_link_libraries(client ${catkin_LIBRARIES})
add_dependencies(client ${PROJECT_NAME}_gencpp)
- 编译通过:
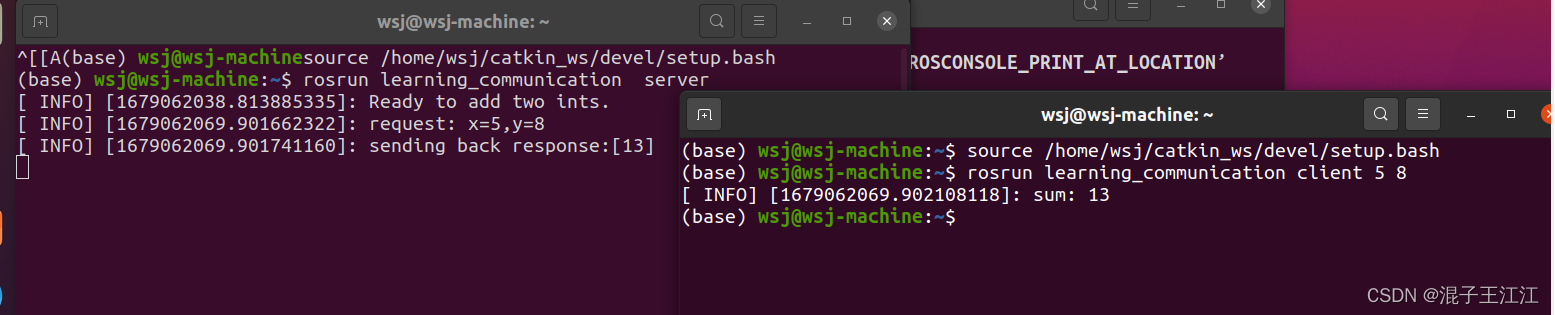
4、测试
- 开三个终端进行测试:
roscore
rosrun learning_communication server
rosrun learning_communication client 整数1 整数2
- 效果:
四、动作编程
- 任务:
客户端发送一个运动坐标,模拟机器人运动到目标位置的过程。包括服务端和客户端的代码实现,要求带有实时位置反馈。
1、新建action文件夹和TurtleMove.action文件
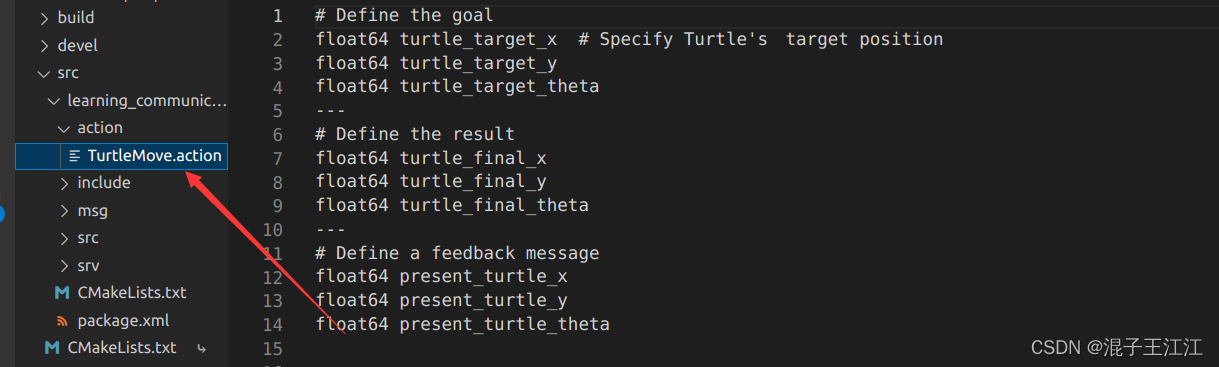
- 代码:
# Define the goal
float64 turtle_target_x # Specify Turtle's target position
float64 turtle_target_y
float64 turtle_target_theta
---
# Define the result
float64 turtle_final_x
float64 turtle_final_y
float64 turtle_final_theta
---
# Define a feedback message
float64 present_turtle_x
float64 present_turtle_y
float64 present_turtle_theta2、 新建turtleMove.cpp服务文件:
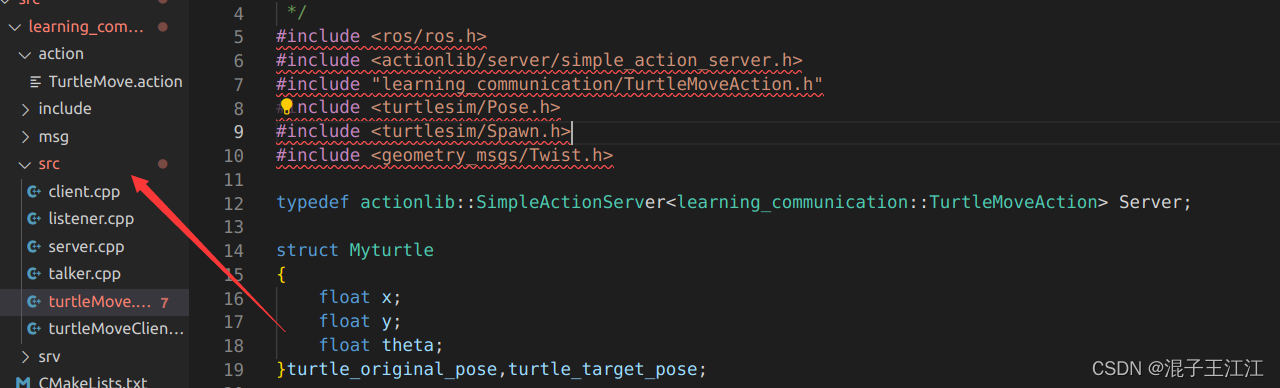
- 代码:
/* 此程序通过通过动作编程实现由client发布一个目标位置然后控制Turtle运动到目标位置的过程*/
#include
#include
#include "learning_communication/TurtleMoveAction.h"
#include
#include
#include typedef actionlib::SimpleActionServer Server;struct Myturtle
{float x;float y;float theta;
}turtle_original_pose,turtle_target_pose;ros::Publisher turtle_vel;void posecallback(const turtlesim::PoseConstPtr& msg)
{ ROS_INFO("Turtle1_position:(%f,%f,%f)",msg->x,msg->y,msg->theta);turtle_original_pose.x=msg->x; turtle_original_pose.y=msg->y;turtle_original_pose.theta=msg->theta;}// 收到action的goal后调用该回调函数
void execute(const learning_communication::TurtleMoveGoalConstPtr& goal, Server* as)
{learning_communication::TurtleMoveFeedback feedback;ROS_INFO("TurtleMove is working.");turtle_target_pose.x=goal->turtle_target_x;turtle_target_pose.y=goal->turtle_target_y; turtle_target_pose.theta=goal->turtle_target_theta;geometry_msgs::Twist vel_msgs;float break_flag;while(1){ ros::Rate r(10);vel_msgs.angular.z = 4.0 * (atan2(turtle_target_pose.y-turtle_original_pose.y,turtle_target_pose.x-turtle_original_pose.x)-turtle_original_pose.theta);vel_msgs.linear.x = 0.5 * sqrt(pow(turtle_target_pose.x-turtle_original_pose.x, 2) +pow(turtle_target_pose.y-turtle_original_pose.y, 2)); break_flag=sqrt(pow(turtle_target_pose.x-turtle_original_pose.x, 2) +pow(turtle_target_pose.y-turtle_original_pose.y, 2));turtle_vel.publish(vel_msgs);feedback.present_turtle_x=turtle_original_pose.x;feedback.present_turtle_y=turtle_original_pose.y;feedback.present_turtle_theta=turtle_original_pose.theta;as->publishFeedback(feedback);ROS_INFO("break_flag=%f",break_flag);if(break_flag<0.1) break;r.sleep();}// 当action完成后,向客户端返回结果ROS_INFO("TurtleMove is finished.");as->setSucceeded();
}int main(int argc, char** argv)
{ros::init(argc, argv, "TurtleMove");ros::NodeHandle n,turtle_node;ros::Subscriber sub = turtle_node.subscribe("turtle1/pose",10,&posecallback); //订阅小乌龟的位置信息turtle_vel = turtle_node.advertise("turtle1/cmd_vel",10);//发布控制小乌龟运动的速度// 定义一个服务器Server server(n, "TurtleMove", boost::bind(&execute, _1, &server), false);// 服务器开始运行server.start();ROS_INFO("server has started.");ros::spin();return 0;
} 3、新建turtleMoveClient.cpp文件,用于发布位置:
- 代码:
#include
#include "learning_communication/TurtleMoveAction.h"
#include
#include
#include typedef actionlib::SimpleActionClient Client;struct Myturtle
{float x;float y;float theta;
}turtle_present_pose;// 当action完成后会调用该回调函数一次
void doneCb(const actionlib::SimpleClientGoalState& state,const learning_communication::TurtleMoveResultConstPtr& result)
{ROS_INFO("Yay! The TurtleMove is finished!");ros::shutdown();
}// 当action激活后会调用该回调函数一次
void activeCb()
{ROS_INFO("Goal just went active");
}// 收到feedback后调用该回调函数
void feedbackCb(const learning_communication::TurtleMoveFeedbackConstPtr& feedback)
{ROS_INFO(" present_pose : %f %f %f", feedback->present_turtle_x,feedback->present_turtle_y,feedback->present_turtle_theta);
}int main(int argc, char** argv)
{ros::init(argc, argv, "TurtleMove_client");// 定义一个客户端Client client("TurtleMove", true);// 等待服务器端ROS_INFO("Waiting for action server to start.");client.waitForServer();ROS_INFO("Action server started, sending goal.");// 创建一个action的goallearning_communication::TurtleMoveGoal goal;goal.turtle_target_x = 1;goal.turtle_target_y = 1;goal.turtle_target_theta = 0;// 发送action的goal给服务器端,并且设置回调函数client.sendGoal(goal, &doneCb, &activeCb, &feedbackCb);ros::spin();return 0;
}
4、修改CMakeList.txt文件

find_package(catkin REQUIRED COMPONENTSroscpprospystd_msgsmessage_generationactionlib_msgsactionlib
)
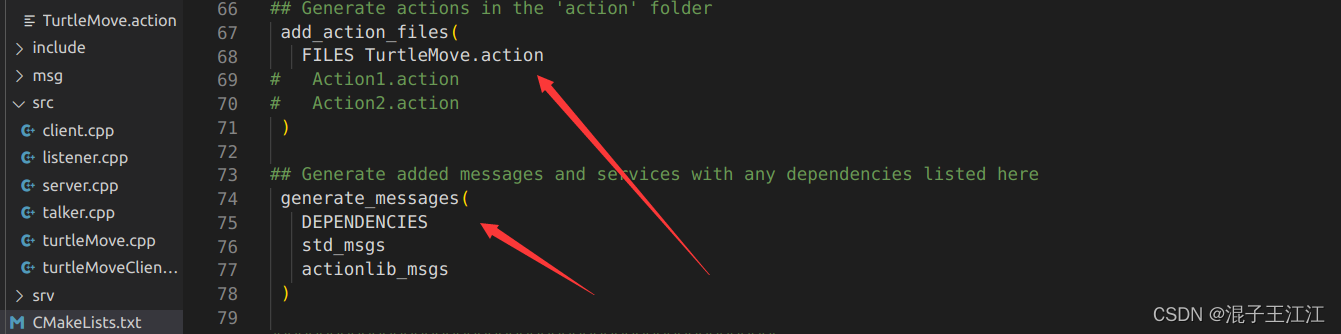
add_action_files(FILES TurtleMove.action
)
generate_messages(DEPENDENCIESstd_msgsactionlib_msgs)

add_executable(turtleMoveClient src/turtleMoveClient.cpp)
target_link_libraries(turtleMoveClient ${catkin_LIBRARIES})
add_dependencies(turtleMoveClient ${PROJECT_NAME}_gencpp)
add_executable(turtleMove src/turtleMove.cpp)
target_link_libraries(turtleMove ${catkin_LIBRARIES})
add_dependencies(turtleMove ${PROJECT_NAME}_gencpp)
- 修改package.xml文件:
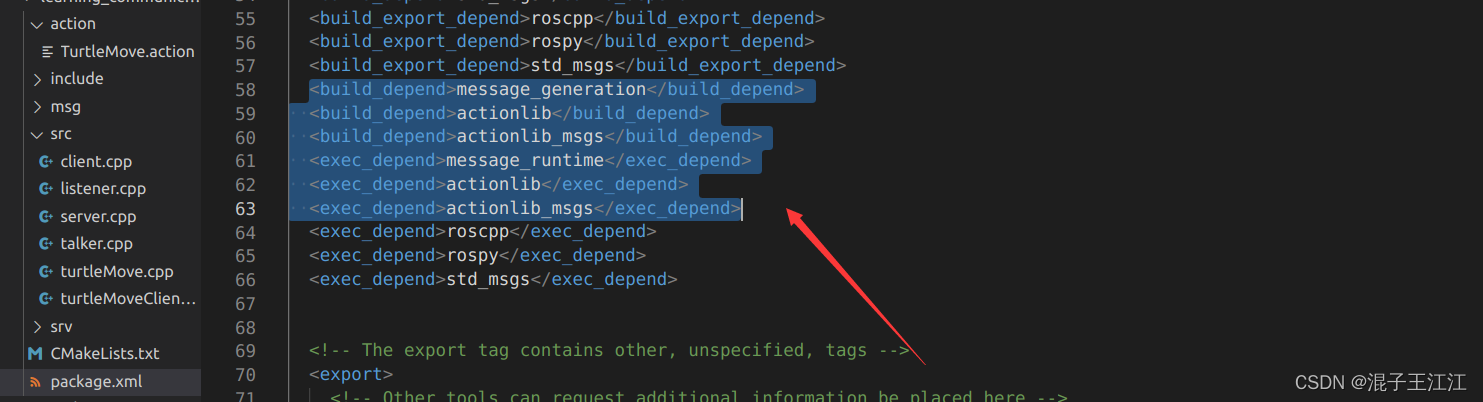
message_generation actionlib actionlib_msgs message_runtime actionlib actionlib_msgs
- 编译成功:
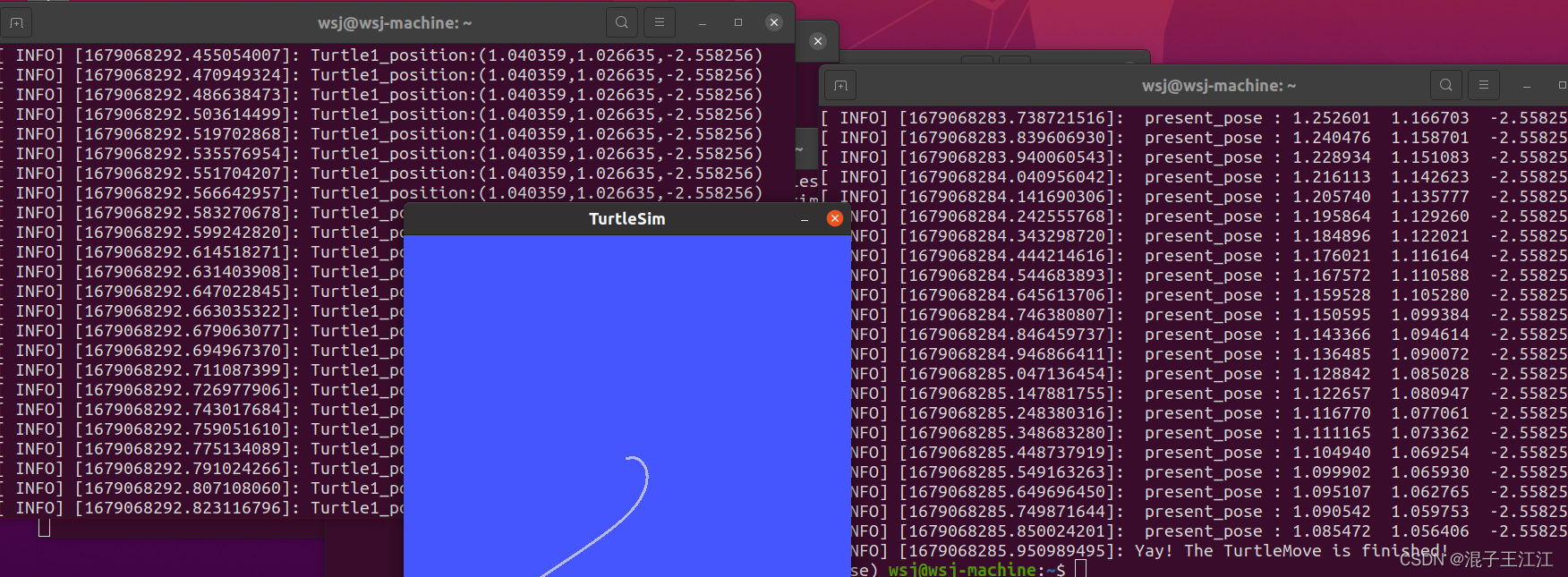
5、测试
依次打开四个终端运行:
roscore
rosrun turtlesim turtlesim_node
rosrun learning_communication turtleMove
rosrun learning_communication turtleMoveClient
五、总结
这里学习了三种通信方式,话题、服务、动作等三种方式,我觉得难度在一级级的增加。通过这次作业,对三种通信方式的具体实现步骤有了更加清晰的了解,尤其对Cmaketext的文件的理解更深入。不足的是这次的分布式通信没有完成,总是出现各种各样的问题、ping不通或者是控制不了,云服务和其他电脑都试过了都不行,等下次看能不能实现在发表博客。
六、参考资料
ROS基础——话题、服务、动作编程
相关内容
热门资讯
保存时出现了1个错误,导致这篇...
当保存文章时出现错误时,可以通过以下步骤解决问题:查看错误信息:查看错误提示信息可以帮助我们了解具体...
汇川伺服电机位置控制模式参数配...
1. 基本控制参数设置 1)设置位置控制模式 2)绝对值位置线性模...
不能访问光猫的的管理页面
光猫是现代家庭宽带网络的重要组成部分,它可以提供高速稳定的网络连接。但是,有时候我们会遇到不能访问光...
不一致的条件格式
要解决不一致的条件格式问题,可以按照以下步骤进行:确定条件格式的规则:首先,需要明确条件格式的规则是...
本地主机上的图像未显示
问题描述:在本地主机上显示图像时,图像未能正常显示。解决方法:以下是一些可能的解决方法,具体取决于问...
表格中数据未显示
当表格中的数据未显示时,可能是由于以下几个原因导致的:HTML代码问题:检查表格的HTML代码是否正...
表格列调整大小出现问题
问题描述:表格列调整大小出现问题,无法正常调整列宽。解决方法:检查表格的布局方式是否正确。确保表格使...
Android|无法访问或保存...
这个问题可能是由于权限设置不正确导致的。您需要在应用程序清单文件中添加以下代码来请求适当的权限:此外...
银河麒麟V10SP1高级服务器...
银河麒麟高级服务器操作系统简介: 银河麒麟高级服务器操作系统V10是针对企业级关键业务...
【NI Multisim 14...
目录 序言 一、工具栏 🍊1.“标准”工具栏 🍊 2.视图工具...