使用 Python 从点云生成 3D 网格
从点云生成 3D 网格的最快方法

已经用 Python 编写了几个实现来从点云中获取网格。它们中的大多数的问题在于它们意味着设置许多难以调整的参数,尤其是在不是 3D 数据处理专家的情况下。在这个简短的指南中,我想展示从点云生成网格的最快和最简单的过程。
1、介绍
点云是具有 3 轴坐标(x, y, z)的点的集合。这种类型的集合可以来自不同的来源并以不同的格式保存。可以使用称为表面重建算法的不同算法将点云转换为 3D 网格。为了执行表面重建,本指南使用PyVista,这是一个易于使用的库来处理 3D 数据。
要从 PyPI 安装最新版本的 PyVista,请使用:
pip install pyvistaa2、程序
生成网格的代码非常短。你只需要提供一个N × 3形状的 NumPy 数组,其中N是点的数量,三列是每个点的x位置、y位置和z位置。该过程中最具挑战性的部分是获取感兴趣对象的点云,因为一旦有了它,生成网格的完整代码就非常短:
import numpy as npimport pyvista as pv# NumPy array with shape (n_points, 3)points = np.genfromtxt('points.csv', delimiter=",", dtype=np.float32)point_cloud = pv.PolyData(points)mesh = point_cloud.reconstruct_surface()mesh.save('mesh.stl')在此示例中,点云是从以下格式的 CSV 文件中提取的:
不管你的观点来自哪里,重要的是pv.PolyData(points)按照上面提到的格式向方法传递一个 NumPy 数组。
如果你想可视化点云使用:
point_cloud.plot(eye_dome_lighting= True )
Eye Dome 照明是一种着色技术,可在可视化点云时改善深度感知。
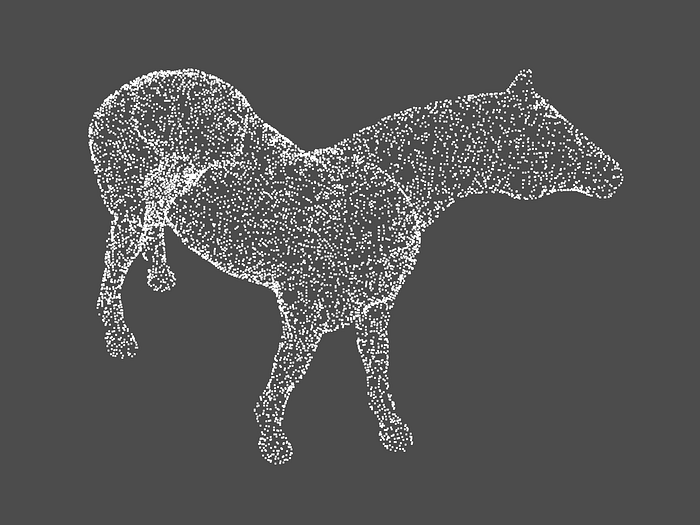
点云可视化的示例。来自PyVista 示例的源文件。
如果您想可视化生成的网格,请使用:
mesh.plot(color='orange')
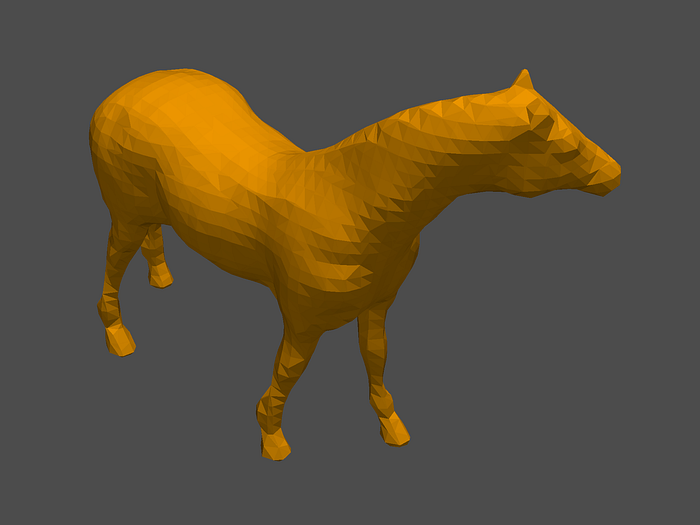
网格可视化的示例。来自PyVista 示例的源文件。
3、结论
代码必须根据点云的来源稍作修改,否则,只需几行代码即可生成网格。我没有提到各种理论上的东西,但它们并不是完成工作所必需的。如果你想从图像生成 3D 网格,你还可以查看我的其他指南:
下一篇:Vue2源码-初始化