基于 Zynq 的振动台控制器架构设计与算法实现-总体架构设计(一)
创始人
2025-05-31 07:53:25
0次
电液振动台可以模拟真实环境下的振动,被广泛应用于建筑抗震模拟、材料
结构试验、汽车测试、海上舷梯等领域。控制电液振动台所需的高性能振动控制
器主要依赖进口。近年来基于 FPGA 的振动控制器开始凸显其优势,更适合用于
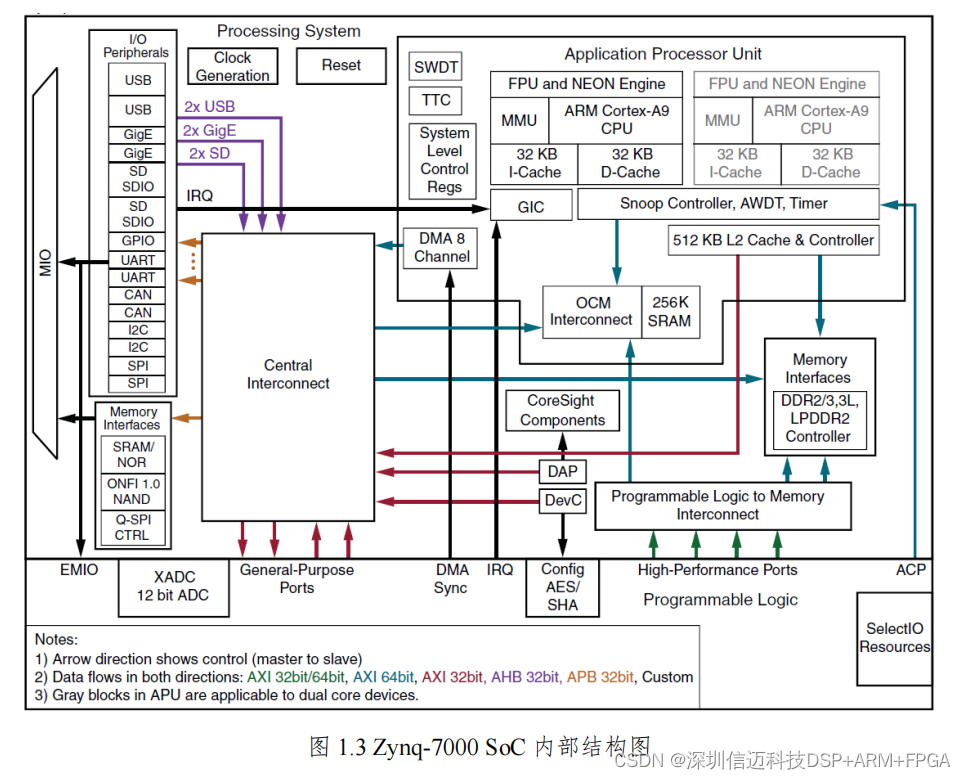
多通道、高频率等测试场景。 本文基于 Zynq-7000 芯片的 CPU+FPGA 架构,设计了一套结构清晰、通用 性强、易于扩展的振动台控制程序,实现了数据采集、控制、以太网通信等功能。 进行系统测试,验证了控制器架构的合理性和有效性。进行了正弦波试 验和地震波试验,其中正弦波试验的位移相关系数和加速度相关系数分别达到 99.86%和 94.87%,地震波试验分别达到 99.998%和 65.68%。 1.3 Zynq-7000 芯片介绍 Zynq-7000 是 Xilinx 公司生产的 ARM CPU+FPGA 架构的 SOC 芯片[16],它 采用 28nm 工艺。它分为 Processing System(简称 PS)和 Programmable Logic(简 称 PL)两部分[17],PS 部分是双核 ARM Cortex A9 处理器,能运行完整的像 Linux 这样的操作系统,而 PL 部分是基于 Xilinx 7 系列(Artix-7/Kintex-7)的 FPGA 架 构,两者之间通过 AXI 接口,实现了高带宽、低延迟的连接。处理器和逻辑部分 各自都可以发挥最佳的性能,并且单芯片会带来物理尺寸和整体成本的降低[18]。 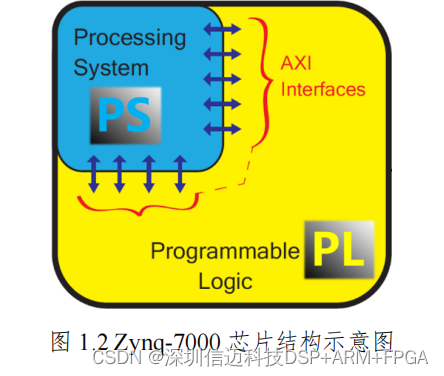
 等[21]。其中的以太网通信功能是需要与 Zynq 控制器配合完成的,两者之间会进 行大量交互,是一个双向通信的过程。
等[21]。其中的以太网通信功能是需要与 Zynq 控制器配合完成的,两者之间会进 行大量交互,是一个双向通信的过程。  2.2 硬件电路板功能简介 振动台 Zynq 控制器参考信迈的ZYNQ板卡,硬件电路主要分为几大模块:Zynq 核心模块、电源管理 模块、输入模块、输出模块、存储模块、通信模块[22]。其中通信模块负责与上位 机软件进行以太网通信;输入模块负责采集实际的运动数据,包括位移传感器的 SSI 数字信号、加速度传感器的模拟电压信号、力传感器的模拟电压信号等;输 出模块主要负责输出控制电压,再通过一个电压转电流模块,以驱动液压伺服阀, 使作动器动作。
2.2 硬件电路板功能简介 振动台 Zynq 控制器参考信迈的ZYNQ板卡,硬件电路主要分为几大模块:Zynq 核心模块、电源管理 模块、输入模块、输出模块、存储模块、通信模块[22]。其中通信模块负责与上位 机软件进行以太网通信;输入模块负责采集实际的运动数据,包括位移传感器的 SSI 数字信号、加速度传感器的模拟电压信号、力传感器的模拟电压信号等;输 出模块主要负责输出控制电压,再通过一个电压转电流模块,以驱动液压伺服阀, 使作动器动作。 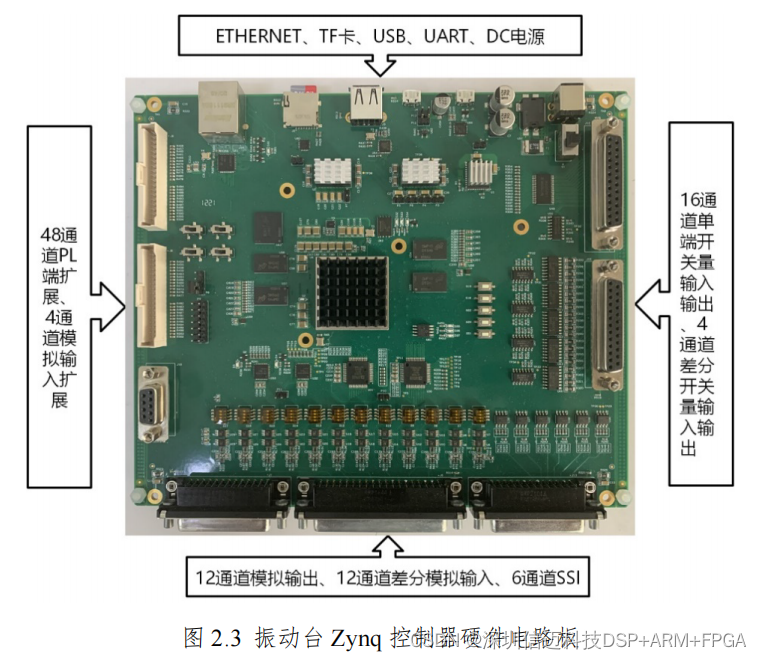 2.3 Zynq 控制器程序设计的目标 结合整个振动台控制系统的需求,以及上位机软件和硬件电路的已有条件, 总结出 Zynq 控制器程序设计的目标功能: ① 数据的采集与处理功能,主要包括 SSI 数字信号的采集与处理、ADC 数 据的采集与处理; ② 输出驱动,主要指驱动 DAC; ③ 能够形成基本的反馈控制回路,支持参数的可配置; ④ 与上位机软件的以太网通信功能,主要包括接收参考波形、参考波形与 实际波形的上传、接收参数修改命令并修改参数。 信迈提供ZYNQ控制器定制化解决方案。
2.3 Zynq 控制器程序设计的目标 结合整个振动台控制系统的需求,以及上位机软件和硬件电路的已有条件, 总结出 Zynq 控制器程序设计的目标功能: ① 数据的采集与处理功能,主要包括 SSI 数字信号的采集与处理、ADC 数 据的采集与处理; ② 输出驱动,主要指驱动 DAC; ③ 能够形成基本的反馈控制回路,支持参数的可配置; ④ 与上位机软件的以太网通信功能,主要包括接收参考波形、参考波形与 实际波形的上传、接收参数修改命令并修改参数。 信迈提供ZYNQ控制器定制化解决方案。
等[21]。其中的以太网通信功能是需要与 Zynq 控制器配合完成的,两者之间会进 行大量交互,是一个双向通信的过程。 2.2 硬件电路板功能简介 振动台 Zynq 控制器参考信迈的ZYNQ板卡,硬件电路主要分为几大模块:Zynq 核心模块、电源管理 模块、输入模块、输出模块、存储模块、通信模块[22]。其中通信模块负责与上位 机软件进行以太网通信;输入模块负责采集实际的运动数据,包括位移传感器的 SSI 数字信号、加速度传感器的模拟电压信号、力传感器的模拟电压信号等;输 出模块主要负责输出控制电压,再通过一个电压转电流模块,以驱动液压伺服阀, 使作动器动作。 2.3 Zynq 控制器程序设计的目标 结合整个振动台控制系统的需求,以及上位机软件和硬件电路的已有条件, 总结出 Zynq 控制器程序设计的目标功能: ① 数据的采集与处理功能,主要包括 SSI 数字信号的采集与处理、ADC 数 据的采集与处理; ② 输出驱动,主要指驱动 DAC; ③ 能够形成基本的反馈控制回路,支持参数的可配置; ④ 与上位机软件的以太网通信功能,主要包括接收参考波形、参考波形与 实际波形的上传、接收参数修改命令并修改参数。 信迈提供ZYNQ控制器定制化解决方案。
相关内容
热门资讯
前端-session、jwt
目录: (1)session (2&#x...
linux入门---制作进度条
了解缓冲区 我们首先来看看下面的操作: 我们首先创建了一个文件并在这个文件里面添加了...
关于测试,我发现了哪些新大陆
关于测试 平常也只是听说过一些关于测试的术语,但并没有使用过测试工具。偶然看到编程老师...
前缀和与对数器与二分法
1. 前缀和 假设有一个数组,我们想大量频繁的去访问L到R这个区间的和,...
nodejs:本地安装nvm实...
一、背景-使用不同版本node的原因 vue3+ts、nuxt3版本,node...
JAVA集合知识整理
Java集合知识整理 HashMap相关 HashMap的底层数据结构:jdk1.8之...
无刷直流电机介绍及单片机控制实...
无刷直流电机介绍及单片机控制实例前言基本概念优势与劣势使用寿命基本结构使用单片机控制实例电子调速器&...
fwdiary(2) dp2
1.传纸条 AcWing 275. 传纸条 - AcWing 走两条路,走一条最大的...
常用的DOS命令
常用的DOS命令 DOS(Disk Operating System,磁...
<C++> 类和对象(下)
1.const成员函数将const修饰的“成员函数”称之为const成员函数,cons...