【面试复盘】字节电商视觉算法工程师一面
创始人
2025-06-01 01:53:34
0次
来源:投稿 作者:LSC
编辑:学姐
话不多说,直接上题
1.链表反转
ListNode* reverseList(ListNode* head)
{ListNode *prev = nullptr;ListNode *curr = head;while (curr){ListNode *next = curr->next;curr->next = prev;prev = curr;curr = next;}return prev;
}
2.小偷偷东西,但是不能在相邻的两个房子里偷东西,问偷到的物品价值的最大值
经典的动态规划问题
状态转移方程式:
dp[0] = v[0] // v是物品价值的数组,dp[i]代表偷到第i家的时候的最大值
dp[1] = v[1]
dp[i] = max(dp[i - 1], dp[i - 2] + v[i]) // 要么不偷当前这家,要么偷了加上之前不相邻的一家偷的总和,取最大值
3.mAP
(1)先计算出每个类别的AP,总共m个类,
(2)AP的计算: 同一类目标检测结果框对应的precision和recall,
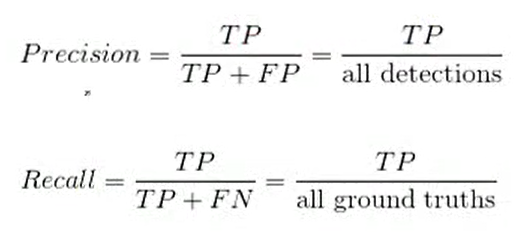
其中all detctions代表所有预测框的数量, all ground truths代表所有GT的数量。
(3)如下图所示:
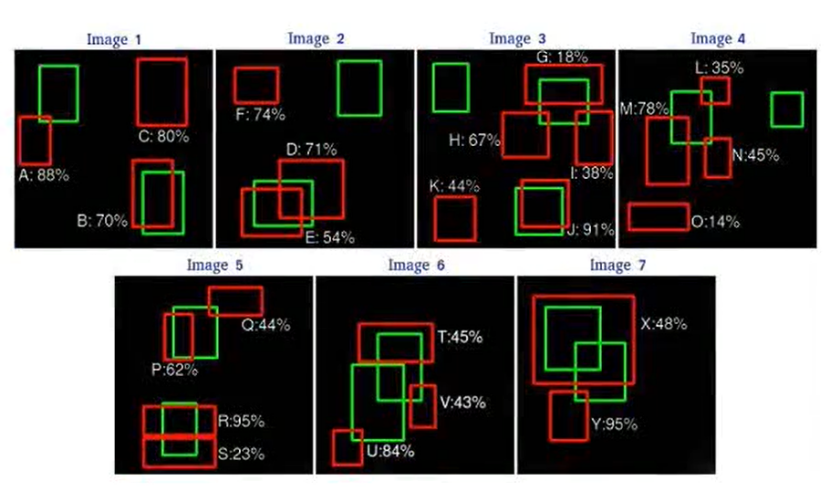
- 根据
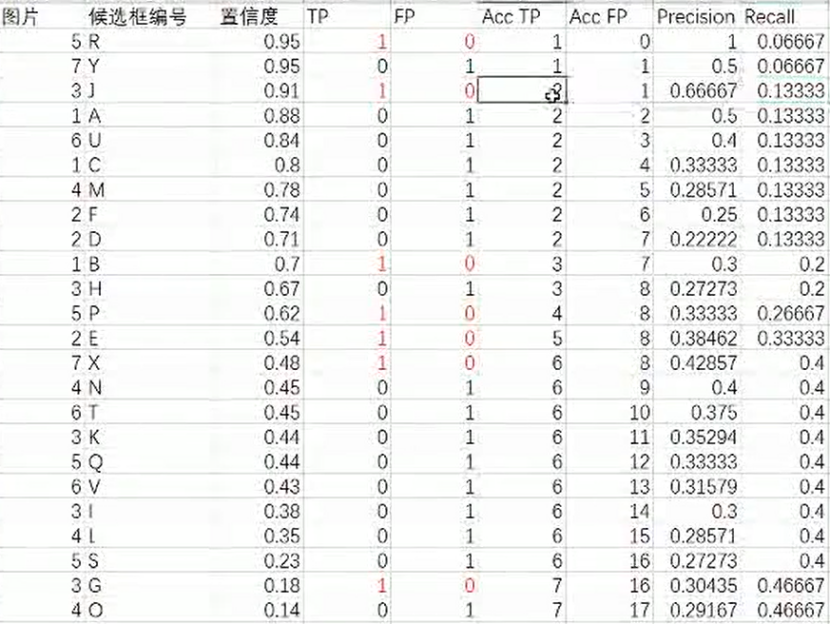
IoU划分TP&FP - 按置信度的从大到小,计算P值和R值
- 绘制
P-R曲线,进行AP计算 - 多个与GT重叠的候选框均符合条件时,选取IoU最高的为TP,其余均为FP。
(4)最后画出以recall为横坐标,precision为纵坐标的图,
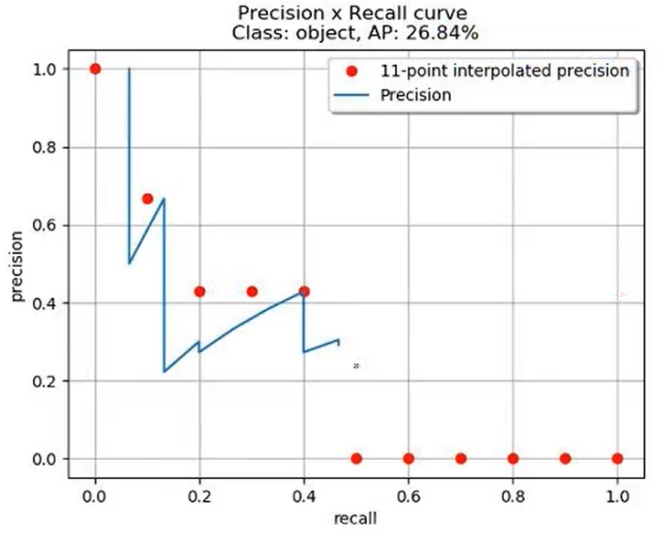
(5)补齐,计算近似的面积
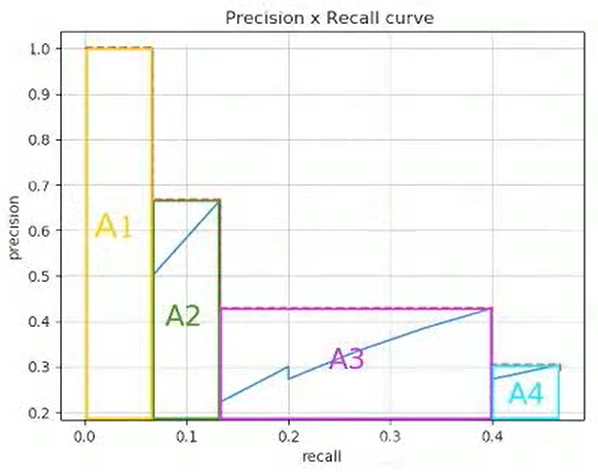
A1+A2+A3+A4就是大致的面积AP
注意一点,一般precision和recall计算前100个点就足够了,再多会被抛弃,而且意义不大
(6)把每个类的AP求和,除以m,就是mAP
4.四种BatchNorm
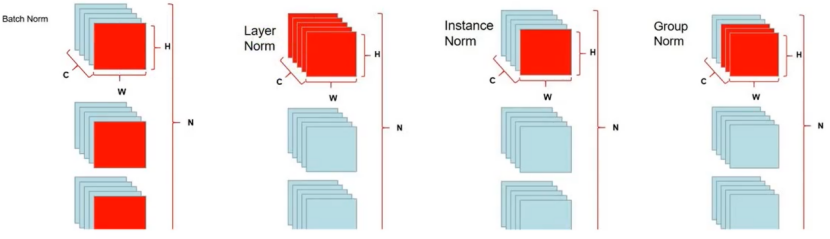
对于[batch, c, w, h]的特征图
- (1)是在batch这个维度上的批标准化,就是我们最常用的bn
- (2)是在C这个维度上的批标准化,也叫Layer Norm
- (3)是在[w, h]这个维度上的批标准化,也叫Instance Norm
- (4)是在c这个维度上分组的批标准化,也叫GroupNorm
四种BN如下图,从左到右:
5.介绍nms
非极大值抑制
- (1)设定目标框的置信度阈值,常用的阈值是0.5左右
- (2)根据置信度降序排列候选框列表
- (3)选取置信度最高的框A添到输出列表,将其从候选框列表中删除
- (4)候选框列表中的所有框依次与A计算IoU,删除大于阈值的候选框
- (5)重复上述过程,直到候选框列表为空,返回输出列表
6.介绍FCOS目标检测网络
这是一个anchor free的目标检测网络,应该说是一个anchor point的网络,它是基于feature map上的点来检测目标的,其中是采用特定的规则去对应的目标框的,Neck部分同样使用了FPN,使用了focal loss损失函数,能有效处理数据不均衡的情况。
关注下方《学姐带你玩AI》🚀🚀🚀
回复“简历”获取算法工程师万能简历公式
每周都会更新大牛面经,关注一下不迷路
码字不易,欢迎大家点赞评论收藏!
相关内容
热门资讯
前端-session、jwt
目录: (1)session (2&#x...
linux入门---制作进度条
了解缓冲区 我们首先来看看下面的操作: 我们首先创建了一个文件并在这个文件里面添加了...
关于测试,我发现了哪些新大陆
关于测试 平常也只是听说过一些关于测试的术语,但并没有使用过测试工具。偶然看到编程老师...
前缀和与对数器与二分法
1. 前缀和 假设有一个数组,我们想大量频繁的去访问L到R这个区间的和,...
nodejs:本地安装nvm实...
一、背景-使用不同版本node的原因 vue3+ts、nuxt3版本,node...
JAVA集合知识整理
Java集合知识整理 HashMap相关 HashMap的底层数据结构:jdk1.8之...
无刷直流电机介绍及单片机控制实...
无刷直流电机介绍及单片机控制实例前言基本概念优势与劣势使用寿命基本结构使用单片机控制实例电子调速器&...
fwdiary(2) dp2
1.传纸条 AcWing 275. 传纸条 - AcWing 走两条路,走一条最大的...
常用的DOS命令
常用的DOS命令 DOS(Disk Operating System,磁...
<C++> 类和对象(下)
1.const成员函数将const修饰的“成员函数”称之为const成员函数,cons...